Cứu Hộ Bộ Nhớ Trung Tâm: Sửa Lỗi Chíp Nhớ AL015 Và Kỹ Thuật Nạp Lại Firmware Gốc Trên Servo DELTA
Mọi hành vi đóng ngắt của khối công suất IGBT, thuật toán bù sai số vị trí, và việc lưu trữ các tham số cài đặt (P1_xx, P2_xx) của Servo DELTA đều được quản lý bởi Khối vi điều khiển trung tâm (MCU/DSP) kết hợp cùng chíp nhớ điện tĩnh EEPROM / Flash Memory.
Khi vùng dữ liệu này bị tổn thương do nhiễu cao tần đánh sập hoặc do tắt nguồn đột ngột đúng lúc Driver đang lưu tham số, hệ thống sẽ bị "mất não". Lúc này, Driver sẽ khóa cứng toàn bộ xung lực và báo lỗi AL015, hoặc tệ hơn là treo đơ màn hình LED và không nhận bất kỳ lệnh điều khiển nào từ bàn phím.
1. Bản chất phần cứng: Chu kỳ ghi xóa của EEPROM và Hiện tượng lỗi tổng kiểm (Checksum Error)
-
Giới hạn chu kỳ sống của chíp nhớ (Flash Fatigue): Các chíp nhớ dán (như họ 24Cxxx hoặc AT25xxx) có một giới hạn số lần đọc/ghi dữ liệu (thường là khoảng $100.000$ đến $1.000.000$ chu kỳ). Trong các hệ thống máy CNC sử dụng lệnh truyền thông Modbus/EtherCAT liên tục ghi đè các tham số vị trí vào chíp nhớ theo thời gian thực, chíp nhớ sẽ nhanh chóng bị "lão hóa" ô dữ liệu, dẫn đến không thể lưu thông tin và phát ngắt lỗi AL015.
-
Lỗi xung đột dữ liệu (Firmware Corrupted): Khi điện áp nguồn nuôi $+5 ext{V}$ bị nhiễu sóng hài xung nhọn dội vào đúng thời điểm Driver đang khởi động, quá trình kiểm tra mã ma trận dữ liệu (Checksum) giữa CPU và chíp nhớ bị sai lệch. CPU sẽ phát hiện dữ liệu cấu hình hệ thống đã bị biến dạng, lập tức ra lệnh khóa toàn bộ bo mạch để ngăn chặn hiện tượng motor tự động chạy loạn dòng.
2. Quy trình 4 bước rã chíp cứu hộ và Nạp lại bộ nhớ Flash gốc cho Driver DELTA
1.Bước 1: Cách ly bo mạch logic điều khiển và Định vị vị trí chíp nhớ:Đo cách ly bo điều khiển.
• Tháo toàn bộ vỏ nhựa của Driver Delta, bóc tách riêng biệt bo mạch điều khiển (Control Board - bo mạch hai lớp có màn hình hiển thị) ra khỏi khối nguồn lực công suất cao.
• Dùng kính lúp soi kỹ khu vực xung quanh chip xử lý trung tâm DSP (thường là chíp vuông nhiều chân của hãng TI). Tìm con chíp dán 8 chân nhỏ (Mã hiệu thường bắt đầu bằng 24C..., 93C... hoặc AT...). Đây chính là nơi lưu giữ toàn bộ mã Firmware định danh dòng máy và hệ thống tham số máy của Delta.
2.Bước 2: Sử dụng máy khò nhiệt nhổ chip và Đọc mã Dump dữ liệu:Trích xuất bộ nhớ cũ.
• Dùng mỡ hàn quét nhẹ lên 8 chân của chíp nhớ, chỉnh máy khò nhiệt ở mức $320^circ ext{C}$ với gió nhỏ để nhổ con chíp này ra khỏi bo mạch mà không làm bong tróc các đường mạch in siêu mịn xung quanh.
• Đặt chíp nhớ vào đế nạp của Máy nạp ROM chuyên dụng (RT809H hoặc CH341A Programmer). Kết nối máy tính và tiến hành đọc dữ liệu gốc hiện tại (Read), lưu lại một bản dự phòng (Backup file .BIN/.HEX) để làm đối chứng.
3.Bước 3: Ghi đè file Firmware chuẩn và Thay thế xác chíp nhớ mới:Nạp tệp tin Firmware gốc.
• Nếu máy nạp ROM báo lỗi xác minh dữ liệu (Verify Error), chứng tỏ con chíp cũ đã bị hỏng phần cứng ô nhớ. Hãy lấy một con chíp nhớ mới tinh cùng mã hiệu.
• Tải file dữ liệu Dump gốc (được trích xuất từ một Driver chạy tốt cùng mã model, cùng công suất của dòng Delta tương ứng). Tiến hành nạp (Write) dữ liệu chuẩn này vào chíp nhớ mới. Đảm bảo quá trình kiểm tra mã Checksum trên phần mềm nạp báo trùng khớp 100%.
4.Bước 4: Hàn trả chíp nhớ về bo mạch và Chạy thuật toán khởi tạo:Đóng chíp và chạy thử.
• Hàn con chíp chứa dữ liệu sạch trở lại vị trí cũ trên bo mạch điều khiển. Dùng dung dịch vệ sinh mạch tẩy sạch toàn bộ vết bẩn mỡ hàn.
• Lắp bo mạch trở lại Driver, cấp nguồn điều khiển $24 ext{V}$ hoặc $220 ext{VAC}$ phụ vào trước. Nếu màn hình LED sáng rực rỡ, hiển thị thông số dòng lệnh và xóa sạch cờ báo lỗi AL015, bạn đã cứu hộ dữ liệu thành công. Tiến hành truy cập tham số P2_08 đặt bằng 10 để Factory Reset, đưa mọi cài đặt về trạng thái nguyên bản của nhà máy.
3. Khuyên dùng thực chiến: Cứu hộ Driver DELTA bị "Bricked" (Chết nguồn mềm) sau khi cập nhật Firmware lỗi
????️ MẸO THỰC CHIẾN TỪ KỸ SƯ KHÔI PHỤC HỆ THỐNG:
Hiện nay, rất nhiều dòng Servo DELTA thế hệ mới như ASDA-A3 và ASDA-B3 cho phép kỹ sư cập nhật Firmware nâng cấp hệ thống trực tiếp thông qua phần mềm ASDA-Soft kết nối bằng cáp USB. Một tai nạn cực kỳ phổ biến là: Trong lúc phần mềm đang chạy thanh phần trăm cập nhật ($20\% - 50\%$), dây cáp USB bị lỏng giắc hoặc xưởng bị mất điện đột ngột.
Hậu quả: Driver bị rơi vào trạng thái "Bricked" hoàn toàn - màn hình tối đen, quạt gió quay vù vù ở tốc độ tối đa nhưng cắm cáp USB vào máy tính không còn nhận thiết bị phần cứng nữa.
Giải pháp cứu hộ khẩn cấp không cần tháo chip:
Trên bo mạch điều khiển của Delta luôn thiết lập một cặp điểm tiếp điểm đồng nhỏ gọi là Chân Khởi Động Buộc (Boot Mode Jumpers).
-
Hãy ngắt toàn bộ nguồn điện của Driver.
-
Dùng một chiếc panh kẹp kim loại câu tắt hai điểm mạch BOOT này lại với nhau (Xem ký hiệu in trên bo mạch dán).
-
Trong lúc giữ chặt kẹp câu tắt, tiến hành cấp nguồn cho Driver. Lúc này CPU của Delta sẽ bị ép cưỡng bức khởi động vào một phân vùng bộ nhớ đệm an toàn nguyên bản (Màn hình vẫn sẽ tối đen, nhưng máy tính sẽ nhận lại cổng COM kết nối USB).
-
Mở phần mềm ASDA-Soft lên, chọn mục Firmware Update, tiến hành nạp lại tệp tin Firmware từ đầu cho đến khi báo thành công $100\%$. Nhả kẹp câu tắt ra và khởi động lại nguồn, Driver của bạn sẽ hồi sinh hoàn hảo từ cõi chết!

Kiểm Soát Vòng Dòng Điện Động Lực: Sửa Lỗi Nhiễu Cảm Biến Hall Và Khắc Phục Hiện Tượng Servo DELTA Bị Rung Giật
Mọi chuyển động quay mượt mà của motor Servo DELTA phụ thuộc vào việc kiểm soát chính xác cường độ dòng điện hình sin bơm vào 3 pha cuộn dây Stator. Để làm được điều này, Driver sử dụng các Cảm biến dòng điện hiệu ứng Hall (Current Hall Sensors) đặt ở ngõ ra mạch lực để đo dòng điện thực tế theo thời gian thực gửi về cho CPU xử lý.
Khi các cảm biến này bị sai lệch thông số hoặc mạch khuếch đại vi sai bị nhiễu, Driver sẽ mất khả năng kiểm soát dòng điện. Hệ thống sẽ phát ra các tiếng "rít" tần số cao, motor bị rung giật bần bật ngay cả khi chạy không tải, hoặc liên tục nhảy lỗi cắt nguồn AL001.
1. Bản chất phần cứng: Cảm biến dòng hiệu ứng Hall và Hiện tượng lệch điểm không (Zero-Drift Offset)
-
Lỗi lệch điểm "Không" của cảm biến Hall: Các cảm biến dòng trên Driver Delta (thường của các hãng như LEM hoặc Tamura) xuất ra một điện áp tỷ lệ thuận với dòng điện chạy qua pha tương ứng. Ở trạng thái đứng im không tải, điện áp xuất ra phải chuẩn bằng $2.5 ext{V}$. Sau nhiều năm ngâm nhiệt, linh kiện bán dẫn bên trong cảm biến bị lão hóa dẫn đến hiện tượng Trôi điểm không (Zero-Drift). Lúc này dù motor không chạy, cảm biến vẫn báo về một dòng điện "ảo" khiến CPU tính toán sai lệch, xuất dòng kích 3 pha mất cân bằng làm motor bị giật giật khi khởi động.
-
Hiện tượng nhiễu sóng hài tầng lực (PWM Switching Noise): Khối công suất IGBT đóng ngắt ở tần số rất cao (lên tới $15 ext{kHz} - 20 ext{kHz}$), tạo ra một lượng nhiễu điện từ ($EMI$) khổng lồ. Nếu các tụ gốm lọc nhiễu dán xung quanh mạch khuếch đại thuật toán (Op-Amp) đo dòng bị khô hoặc bong chân hàn, các gai nhiễu PWM này sẽ lọt thẳng vào chân AD của vi xử lý, gây kích nổ lỗi quá dòng AL001 giả lập mặc dù dòng điện lực thực tế hoàn toàn an toàn.
2. Quy trình 4 bước rà soát tầng đo dòng và Thay thế linh kiện Driver DELTA
1.Bước 1: Đo kiểm điện áp tĩnh điểm Không (Zero-Offset) của cảm biến Hall:Đo áp cân bằng cảm biến.
• Cấp nguồn phụ cho Driver (không cấp nguồn lực đầu vào), tháo giắc motor. Chuyển đồng hồ vạn năng về thang đo DC mVolt.
• Tìm đến các chân ngõ ra tín hiệu của cảm biến dòng Hall trên bo mạch. Đo điện áp giữa chân tín hiệu (Signal) và chân trung tính (GND). Nếu giá trị đo được lệch ra ngoài khoảng $2.5 ext{V} pm 0.05 ext{V}$ (ví dụ đo ra $2.7 ext{V}$ hoặc $2.2 ext{V}$), chứng tỏ cảm biến Hall đã bị hỏng hóc lõi và cần được thay mới.
2.Bước 2: Sửa chữa mạch khuếch đại vi sai và Thay thế IC thuật toán:Thay thế linh kiện Op-Amp.
• Đường tín hiệu từ cảm biến Hall sẽ chạy qua một chuỗi điện trở dán và dẫn vào một con IC khuếch đại thuật toán Op-Amp (thường là mã TL072, LM358 hoặc các dòng Op-Amp tốc độ cao của hãng TI).
• Khi Driver bị chập nổ IGBT, dòng xung ngược điện áp cao rất dễ đánh thủng con Op-Amp này. Tiến hành khò hút chân và thay thế IC Op-Amp mới, đồng thời rà soát thay thế các con điện trở dán ghim áp dòng xung quanh để khôi phục lại tuyến tính mạch đo dòng.
3.Bước 3: Hiệu chuẩn tham số bộ lọc vòng dòng điện (Current Loop Filter):Cài đặt thông số triệt nhiễu.
• Nếu motor gặp hiện tượng rít giật do nhiễu tần số cao của cơ cấu cơ khí dội ngược về, hãy can thiệp bằng bộ lọc thông thấp của vòng dòng điện thông qua tham số P2_25 (Low-pass Filter Time Constant of Torque Current Command).
• Hãy tăng dần giá trị tham số này lên (mặc định thường là $0.5 ext{ms}$, có thể tăng lên $1.0 ext{ms} - 2.0 ext{ms}$). Bộ lọc này sẽ làm mượt đường cong dòng điện xuất ra, triệt tiêu các sóng hài bậc cao, giúp motor chạy êm ái vượt trội và không bị nóng vỏ.
4.Bước 4: Chạy tính năng tự động bù dòng lệch pha qua phần mềm ASDA-Soft:Đồng bộ hóa pha dòng.
• Kết nối Driver với máy tính và bật phần mềm ASDA-Soft. Truy cập vào mục Parameter Editor, tìm đến các tham số ẩn của hệ thống điều khiển dòng lực.
• Kích hoạt chức năng Current Sensor Auto-Calibration. Lúc này Driver sẽ tự động đo đạc dòng rò tĩnh hiện tại của các pha và tự động tính toán bù trừ (Offset Compensation) vào bộ nhớ số. Sau khi quá trình này hoàn tất, dòng điện 3 pha xuất ra motor sẽ đạt độ cân bằng đối xứng tuyệt đối.

Công ty Trần GIA tự hào là đơn vị hàng đầu cung cấp servo bảo hành lên tới 12 tháng dịch vụ sửa chữa, bảo trì Sửa chữa lỗi AC Servo DELTA với đội ngũ nhân viên chuyên nghiệp và tư vấn kỹ thuật trong lĩnh vực điện tử và thiết bị công nghiệp. Với đội ngũ kỹ thuật viên chuyên nghiệp, giàu kinh nghiệm, chúng tôi cam kết mang đến giải pháp tối ưu, chất lượng cao và giá cả hợp lý cho khách hàng. Trần GIA luôn đặt sự hài lòng của khách hàng lên hàng đầu, phục vụ nhanh chóng, tận tình và chuyên nghiệp. HOTLINE: 0913 56 739
Chúng tôi cam kết sử dụng linh kiện chính hãng, áp dụng các tiêu chuẩn kỹ thuật cao nhất nhằm đảm bảo độ bền và hoạt động ổn định của thiết bị sau sửa chữa. Trần GIA luôn đặt lợi ích của khách hàng lên hàng đầu bằng dịch vụ tư vấn tận tình, hỗ trợ nhanh chóng và chính sách bảo hành rõ ràng, minh bạch.
Vì sao chọn TRAN GIA Automation Sửa chữa lỗi AC Servo DELTA với đội ngũ nhân viên chuyên nghiệp
Bảo hành
– Các khu vực chúng tôi chuyên cung cấp servo : Thành phố Hồ Chí Minh, Long An, Bình Dương, Bình Phước, Bà Rịa-Vũng Tàu, Tây Ninh, Tiền Giang, Tp. Cần Thơ, Sóc Trăng, Bến Tre, An Giang, Đồng Tháp, Kiên Giang, Vĩnh Long, Trà Vinh,…
– Sửa servo tận nơi: Tân Phú, Tân Bình, Gò Vấp, Quận 1, Quận 3, Thủ Đức, Quận 5, Quận 6, Bình Tân, Phú Nhuận, chợ Nhật Tảo, chợ Dân Sinh, KCN Thuận Đạo, KCN Tân Bình, KCN Vĩnh Lộc, KCN Lê Minh Xuân, KCN Mỹ Phước 1, KCN Mỹ Phước 2, KCN Mỹ Phước 3, KCN Sóng Thần, KCN Linh Trung, KCN Hiệp Phước, KCX Tân Thuận, KCN Tân Tạo, KCN Tân Phú Trung, KCN Tây Bắc Củ Chi, KCN Đông Nam, KCN Tân Phú Trung,….

Cẩm Nang Bắt Bệnh Và Sửa Chữa Mã Lỗi AC Servo DELTA (Từ Khối Lực Đến Tín Hiệu)
Hệ thống AC Servo DELTA nổi tiếng với độ bền bỉ cao, nhưng sau nhiều năm vận hành liên tục trong môi trường công nghiệp chịu nhiệt độ cao, độ ẩm và bụi bẩn, các linh kiện điện tử dán bên trong sẽ bước vào giai đoạn lão hóa.
Khi Driver sập lỗi và khóa đầu ra, việc hiểu rõ bản chất mã lỗi hiển thị sẽ giúp kỹ sư bảo trì nhanh chóng định vị được vùng tổn thương (Bo nguồn, Bo lực IGBT, hay Bo điều khiển CPU) để tiến hành thay thế linh kiện chính xác, tiết kiệm chi phí mua mới hệ thống.
2. Quy Trình 4 Bước Chuẩn Đoán Và Can Thiệp Phần Cứng Sửa Lỗi Servo DELTA
1.Bước 1: Đo kiểm tra tầng lực IGBT khi sập lỗi AL001:Đo nguội khối bán dẫn.
• Khi Driver sập lỗi AL001, tuyệt đối không cố bật nguồn lại để tránh làm nổ bung mạch in. Rút toàn bộ giắc cắm, tháo rời bo mạch lực.
• Chuyển đồng hồ vạn năng về thang đo Diode. Tiến hành đo kiểm tra các van bán dẫn IGBT bằng cách đo giữa chân nguồn P (Dương Bus DC) với các chân ra motor U, V, W và chân N (Âm Bus DC) với U, V, W. Nếu có bất kỳ vế nào có điện áp bằng $0 ext{V}$ (hoặc thông mạch tiếng bíp), khối công suất IGBT đã bị đánh thủng và cần được khò nhổ để thay thế bằng module mới chính hãng.
2.Bước 2: Sửa chữa mạch xả hãm và Mạch dò áp ảo khi gặp lỗi AL003:Đo nội trở cầu xả hãm.
• Nếu sập lỗi AL003 khi motor giảm tốc, hãy đo điện trở lực đấu vào chân P+ và D. Nếu điện trở đứt, thay thế bằng điện trở nhôm đúc đúng trị số $Omega$ và công suất $W$.
• Nếu lỗi AL003 xuất hiện ngay khi vừa bật nguồn (quá áp ảo), hãy kiểm tra chuỗi điện trở dán giá trị cao nằm trên đường mạch dò áp Bus DC dẫn về CPU. Tháo ra và thay các con trở dán bị tăng trị số để đưa điện áp mẫu về mức chuẩn.
3.Bước 3: Hiệu chuẩn thuật toán và Đo suất điện động ngược cứu lỗi AL006:Kiểm tra xung dòng.
• Với lỗi quá tải AL006, cần cô lập động cơ khỏi băng tải. Dùng tay quay trục xem có trơn tru không để loại trừ lỗi kẹt bi cơ khí.
• Dùng máy hiện sóng (Oscilloscope) đo điện áp phát ra từ các chân U, V, W khi quay trục động cơ để kiểm tra xem nam châm đất hiếm trên Rotor còn từ tính tốt hay không. Nếu Motor bị om cuộn dây hoặc mất từ do quá nhiệt, tiến hành quấn lại Stator hoặc nạp lại từ cho Rotor.
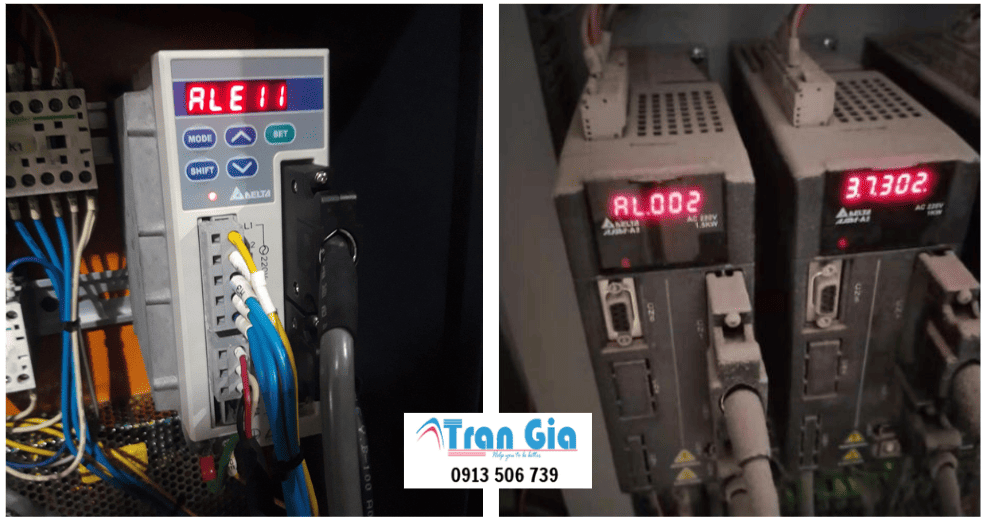
4.Bước 4: Đo áp nguồn và Thay chip truyền thông xử lý triệt để lỗi AL011:Đo sụt áp nguồn nuôi.
• Đo điện áp $5 ext{VDC}$ cấp nguồn cho Encoder ngay tại chân giắc CN2 của Driver. Nếu điện áp tụt dưới $4.75 ext{V}$, chip Encoder sẽ bị reset liên tục gây lỗi chập chờn khi chạy tốc độ cao. Tiến hành thay thế sợi cáp bằng dòng cáp chống đứt ngầm bọc giáp dày.
• Nếu lỗi đứt kết nối cứng, tiến hành tháo vỏ nhựa Encoder ở đuôi motor, thay thế IC dán driver truyền thông Serial để phục hồi đường truyền dữ liệu đồng bộ về vi xử lý.
3. Bí Quyết Kỹ Thuật: Xử lý pan bệnh sụt áp "AL002" chập chờn khi tăng tải
????️ MẸO THỰC CHIẾN TỪ KỸ SƯ SỬA BO MẠCH:
Một pan bệnh rất hay gặp trên các dòng Delta ASDA-B2 và ASDA-A2 đã chạy từ 3 năm trở lên: Máy đứng im hoặc chạy chậm thì hoàn toàn bình thường, nhưng cứ khi vào tải nặng hoặc tăng tốc đột ngột, Driver lập tức sập lỗi AL002 (Low-voltage / Thấp áp nguồn lực). Đo điện áp lưới cấp vào lúc này vẫn đạt $220 ext{V}$ ổn định.
Nguyên nhân cốt lõi:
Do già hóa hệ thống tụ hóa lọc nguồn Bus DC. Qua thời gian dài ngâm điện trong môi trường nhiệt độ cao bên trong lớp vỏ nhựa, dung dịch điện phân trong các quả tụ lớn bị khô dần, làm sụt giảm nghiêm trọng giá trị điện dung ($uF$) thực tế và làm tăng nội trở $ESR$. Khi motor đứng im, tụ vẫn tích đủ điện áp đỉnh, nhưng khi motor kéo tải nặng rút dòng lớn, dàn tụ bị khô không còn khả năng trữ năng lượng để bù áp, khiến điện áp Bus DC tụt sâu tức thời qua ngưỡng bảo vệ an toàn của CPU.
Giải pháp khắc phục:
Tháo Driver, dỡ bỏ dàn tụ nguồn cũ. Thay thế bằng các quả tụ hóa mới có cùng kích thước hình học nhưng chọn loại chịu nhiệt cao ($105^circ ext{C}$) và có điện áp chịu đựng cao hơn một nấc (Ví dụ tụ cũ $400 ext{V}$ thì thay bằng $450 ext{V}$). Driver sẽ lập tức hết hiện tượng báo lỗi ảo AL002, máy chạy thoát tải mạnh mẽ và êm ái hơn rất nhiều.

Làm Chủ Mạng Truy Nhoáng Tốc Độ Cao: Sửa Lỗi CANopen/EtherCAT Trên Servo DELTA Và Kỹ Thuật Chống Nhiễu BUS
Trong kỷ nguyên nhà máy thông minh, các Driver Servo DELTA không còn nhận lệnh xung/hướng (Pulse/Direction) truyền thống đơn lẻ, mà được kết nối trực tiếp với PLC trung tâm thông qua các giao thức mạng công nghiệp tốc độ cao như EtherCAT (dòng ASDA-A2-E, A3-E, B3-E) hoặc CANopen (dòng ASDA-M, A2-M).
Khi hệ thống truyền thông này bị lỗi, toàn bộ dây chuyền sản xuất gồm hàng chục trục Servo sẽ ngay lập tức bị đóng băng, Driver khóa cứng đầu ra và nháy lỗi AL025 (CANopen) hoặc AL035 (EtherCAT), đẩy kỹ sư bảo trì vào bài toán dò tìm lỗi vô cùng phức tạp.
1. Bản chất phần cứng: Trở kháng đặc tính đường truyền và Hiện tượng phản xạ tín hiệu (Signal Reflection)
-
Sự thiếu hụt Điện trở đầu cuối (Termination Resistor): Khác với dây dẫn điện lực thông thường, tín hiệu truyền thông mạng công nghiệp chạy ở dải tần số siêu cao (lên tới $100 ext{Mbps}$ đối với EtherCAT). Khi xung tín hiệu chạy đến điểm cuối cùng của mạng Bus, nếu không có một con Điện trở đầu cuối $120 Omega$ tiêu tán năng lượng, xung điện sẽ bị "dội ngược" trở lại dọc theo đường dây. Hiện tượng phản xạ này sẽ triệt tiêu xung tín hiệu gốc, làm méo mó dạng sóng biến nó thành các mã lỗi truyền thông AL025 chập chờn.
-
Lỗi sụp đổ ngăn xếp dữ liệu (Stack Overflow) do sốc nhiễu: Khi cáp mạng truyền thông được đi chung máng cáp với dây động lực U/V/W hoặc dây nguồn của Biến tần mà không có vách ngăn chống nhiễu, điện trường cao áp từ các dây lực sẽ cảm ứng tạo ra các dòng xung nhọn phá hủy cấu trúc của gói tin (Frame Corrupted). Chip xử lý truyền thông mạng trên Driver Delta không giải mã được dữ liệu liên tục, buộc phải kích hoạt cơ chế tự sát an toàn để cắt kết nối mạng.
2. Quy trình 4 bước cô lập lỗi mạng và Cấu hình truyền thông mượt mà cho Servo DELTA
1.Bước 1: Kiểm tra trở kháng vòng Bus CANopen và Chất lượng cáp chuẩn Cat5e/Cat6:Đo thông số vật lý cáp mạng.
• Tắt nguồn hệ thống, rút giắc truyền thông ra khỏi các Driver. Dùng đồng hồ vạn năng đo điện trở giữa chân CAN_H và CAN_L ở hai đầu xa nhất của mạng Bus.
• Giá trị đo được phải đạt chuẩn xấp xỉ $60 Omega$ (do hai con điện trở đầu cuối $120 Omega$ đấu song song ở hai đầu trục mạng). Nếu đo ra $120 Omega$, hệ thống đang bị mất một điện trở đầu cuối. Nếu là mạng EtherCAT, dùng máy test mạng chuyên dụng để đo suy hao và loại bỏ ngay các đoạn cáp mạng bấm giắc lỗi, lỏng chân.
2.Bước 2: Thay thế IC thu phát vi sai và Cụm biến áp cách ly xung số:Thay chíp cổng mạng.
• Khi cổng mạng bị sét đánh hoặc xung điện nhà xưởng dội về, con IC thu phát dữ liệu dán (như họ AMIS30660 cho CANopen hoặc IC PHY mạng cho EtherCAT) rất dễ bị chết cháy chập.
• Tiến hành kiểm tra linh kiện biến áp xung cách ly nhỏ (Transformer) nằm ngay sau cổng RJ45. Nếu biến áp bị om cuộn dây, tiến hành khò thay thế nguyên cụm cổng RJ45 tích hợp biến áp lọc để hồi sinh phần cứng cổng nhận lệnh.
3.Bước 3: Định cấu hình phân mảnh địa chỉ Node ID và Thiết lập tốc độ truyền Baud Rate:Cài đặt địa chỉ trạm.
• Rất nhiều trường hợp lỗi mạng xuất hiện do kỹ thuật viên thay thế Driver mới nhưng quên chưa gạt công tắc xoay gán địa chỉ vật lý (Node ID) hoặc cài đặt sai tham số đồng bộ tốc độ.
• Truy cập nhóm tham số P3_00 (Địa chỉ trạm mạng) và P3_01 (Tốc độ truyền thông). Đảm bảo mỗi Driver Servo trong mạng có một địa chỉ Node ID duy nhất, tuyệt đối không được trùng nhau và phải khớp 100% với cấu hình phần cứng đã khai báo trong phần mềm lập trình của PLC (như ISPSoft hay TIA Portal).
4.Bước 4: Kích hoạt chế độ đồng bộ chu kỳ quét thời gian thực Distributed Clocks (DC):Đồng bộ thời gian thực.
• Kết nối hệ thống với phần mềm cấu hình mạng của PLC. Đối với mạng EtherCAT, bật tính năng Distributed Clocks (DC) để đồng bộ hóa thời gian chạy của tất cả các trục Servo xuống dải mili-giây cực nhỏ.
• Điều chỉnh tham số chu kỳ quét (Sync Cycle Time) trên phần mềm tương thích với năng lượng xử lý của Driver (thường đặt ở mức $1 ext{ms}$ hoặc $2 ext{ms}$). Trục động cơ sẽ chạy mượt mà, đồng đều hoàn hảo giữa các trục mà không còn hiện tượng rớt nhịp hành trình.

Một số hình ảnh sửa servo đang trong quá trình sửa chữa tại TRAN GIA Automation