Kỹ Thuật Kiểm Tra Linh Kiện Nội Tại Và Chẩn Đoán Qua Phần Mềm ASDA-Soft
Khi các bước kiểm tra ngoại vi (cáp, nhiễu, cơ khí) không mang lại kết quả, chúng ta phải can thiệp vào tầng sâu hơn: phân tích mạch điện và sử dụng công cụ đồ thị.
1. Kiểm tra "Sức khỏe" tầng công suất (IGBT)
Đối với Servo Delta, tầng công suất thường hỏng do sốc điện hoặc quá tải nhiệt lâu ngày.
-
Cách đo nhanh: Rút toàn bộ giắc cắm. Dùng đồng hồ vạn năng thang đo Diode.
-
Đo từ chân P (DC Bus dương) sang U, V, W: Phải hiển thị giá trị sụt áp diode (~0.3V - 0.5V) và cân bằng giữa 3 pha.
-
Đo từ chân N (DC Bus âm) sang U, V, W: Tương tự như trên.
-
Dấu hiệu hỏng: Nếu có bất kỳ cặp chân nào thông mạch (0 Ohm) hoặc hở mạch (OL), IGBT đã bị đánh thủng.
2. Sử dụng chức năng "Scope" trong phần mềm ASDA-Soft
Đây là công cụ mạnh nhất của Delta để bắt các lỗi chập chờn. Bạn có thể quan sát các đường tín hiệu theo thời gian thực (Real-time).
-
Các kênh cần giám sát:
-
Motor Speed (Vận tốc thực): Xem có bị dao động răng cưa không.
-
Current Command (Lệnh dòng điện): Nếu dòng điện vọt lên cao bất thường khi motor chỉ vừa mới quay, có thể do ma sát cơ khí quá lớn hoặc kẹt phanh.
-
Position Error (Sai số vị trí): Nếu sai số này tăng dần, chứng tỏ hệ thống đang bị mất xung hoặc trượt bước cơ khí.
3. Xử lý lỗi "AL011" (Encoder Error) do phần cứng
Lỗi này không chỉ do dây cáp mà còn có thể do board nhận tín hiệu bên trong Driver Delta.
-
Nguyên nhân: Chip thu phát tín hiệu (thường là dòng AM26LS32 hoặc tương đương) bị lỗi do nhiễu cao tần đánh thủng.
-
Cách kiểm tra: Nếu thay cáp mới và motor mới mà Driver vẫn báo AL011 ngay khi bật nguồn, lỗi nằm ở board mạch điều khiển. Cần kiểm tra các linh kiện SMD nhỏ xung quanh giắc cắm CN2.
4. Tối ưu hóa bộ lọc Low-pass Filter (P1-06)
Nếu hệ thống cơ khí của bạn không quá cứng vững (ví dụ dùng dây đai hoặc trục dài), motor sẽ bị rung nhẹ khi dừng.
-
Tham số P1-06: Đây là bộ lọc thông thấp cho lệnh cộng hưởng.
-
Cách chỉnh: Tăng dần giá trị này (ví dụ từ 0 lên 10, 20...). Nó sẽ giúp làm "mượt" các lệnh điều khiển, giảm sốc cho cơ khí và triệt tiêu độ rung chập chờn khi motor đảo chiều.
5. Kiểm tra Tụ điện ngậm (Bus Capacitor)
Trên các dòng ASDA-B2/A2 cũ, tụ điện bị phù hoặc khô sẽ làm Driver báo lỗi AL003 (Undervoltage) khi motor bắt đầu tăng tốc mạnh.
-
Dấu hiệu: Mở nắp Driver, quan sát các tụ hóa lớn nhất. Nếu đầu tụ bị phồng hoặc có vết dung dịch chảy ra, cần thay thế ngay lập tức. Tụ khô không thể tích trữ đủ năng lượng cho các cú "đề-pa" của motor, dẫn đến sụt áp DC Bus nội bộ.

Làm Chủ Electronic Gear Ratio: Xử Lý Lỗi Sai Số Kích Thước Và Giật Cơ Khí
Khi bạn thay thế một bộ Driver Delta mới hoặc thay đổi cơ cấu truyền động (như thay vít me bước khác), việc thiết lập thông số bánh răng điện tử là bắt buộc để PLC và Servo "hiểu nhau".
1. Hiểu về thông số P1-44 và P1-45 (Electronic Gear Ratio)
Thay vì phải tính toán số xung phức tạp trong PLC, Servo Delta cho phép bạn thiết lập tỷ lệ này trực tiếp trên Driver:
-
P1-44 (Tử số - Numerator): Số lượng xung nội bộ của Encoder.
-
P1-45 (Mẫu số - Denominator): Số lượng xung mà Driver nhận được từ PLC.
-
Ý nghĩa: Tỷ lệ này quyết định quãng đường motor quay được ứng với một xung lệnh. Nếu cài đặt sai, máy sẽ chạy quá hành trình hoặc chạy không đủ kích thước.
2. Công thức tính toán chuẩn cho kỹ thuật viên
Để motor quay đúng khoảng cách mong muốn (ví dụ 1 xung = 1 micron), bạn áp dụng công thức:
$$G = frac{ ext{Độ phân giải Encoder}}{ ext{Số xung mỗi vòng quay mong muốn}}$$
-
Ví dụ với dòng Delta B2: Encoder có độ phân giải $160,000$ p/rev. Nếu bạn muốn cấp $10,000$ xung từ PLC để motor quay hết 1 vòng, bạn cài:
3. Dấu hiệu lỗi do sai số bánh răng điện tử
-
Sai số tích lũy: Càng chạy nhiều, sai số càng lớn (ví dụ: chạy 10 lần 100mm, nhưng vị trí cuối cùng lệch mất vài mm).
-
Motor kêu rít khi chạy tốc độ cao: Nếu bạn đặt tỷ lệ bánh răng quá lớn (ví dụ $> 50/1$), các bước nhảy xung sẽ rất lớn, gây ra hiện tượng rung giật mạnh và tiếng ồn cơ khí.
-
Lỗi AL009 (Position Deviation Error): Sai lệch giữa lệnh và thực tế quá lớn vượt mức cho phép.
4. Khắc phục hiện tượng "Trôi tọa độ" ngẫu nhiên
Nếu bánh răng điện tử đã tính đúng nhưng máy vẫn thỉnh thoảng chạy sai, hãy kiểm tra các yếu tố sau:
-
Chế độ xung (P1-00): Đảm bảo chế độ nhận xung (Pulse + Dir, AB Phase hoặc CW/CCW) trên Driver khớp hoàn toàn với cấu hình ngõ ra của PLC.
-
Logic xung (P1-01): Thử đảo ngược logic xung nếu bạn thấy motor bị mất xung ở những đoạn tăng tốc hoặc đảo chiều đột ngột.
-
Lọc nhiễu ngõ vào (P2-02): Nếu cáp tín hiệu bị nhiễu, Driver sẽ đếm nhầm các xung nhiễu thành xung lệnh. Tăng giá trị lọc nhiễu ở P2-02 có thể giúp làm sạch tín hiệu ngõ vào.
5. Kỹ thuật "Auto-Calibration" thực tế
Nếu bạn không biết thông số cơ khí của máy (ví dụ không biết bước vít me hoặc tỷ lệ hộp số):
-
Đánh dấu vị trí hiện tại của bàn máy.
-
Phát ra một lượng xung cố định từ PLC (ví dụ 100,000 xung).
-
Dùng thước kẹp hoặc đồng hồ so đo quãng đường thực tế máy đã đi.
-
Dựa vào tỷ lệ giữa Quãng đường thực tế và Quãng đường mục tiêu để điều chỉnh lại thông số P1-44.
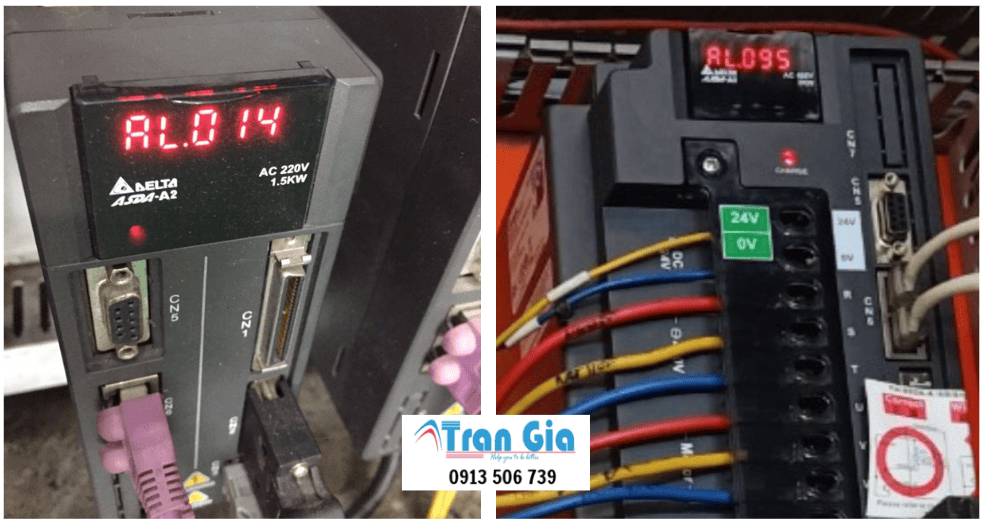
Trong các hệ thống tự động hóa sử dụng dòng Delta (như ASDA-A2, B2, A3), hiện tượng chập chờn thường biểu hiện qua việc: Motor bị rung (vibrate), phát tiếng kêu lạ, chạy sai vị trí ngẫu nhiên, hoặc thỉnh thoảng báo lỗi AL001 (Overcurrent), AL006 (Overload) rồi tự hết khi Reset.
1. Nguyên nhân từ Nhiễu điện từ (EMI)
Đây là nguyên nhân hàng đầu (chiếm 70%) khiến hệ thống Delta mất ổn định. Delta nhạy cảm với các xung nhiễu cao tần.
2. Sự cố kết nối và Cáp truyền tín hiệu
Dây cáp sử dụng lâu ngày trong xích dẫn cáp (Cable Chain) rất dễ bị đứt ngầm hoặc lỏng giắc.
-
Kiểm tra giắc CN1 (Tín hiệu điều khiển): Các chân xung (Pulse) và hướng (Dir) nếu bị tiếp xúc kém sẽ làm motor chạy sai kích thước.
-
Kiểm tra giắc CN2 (Encoder): Nếu dây Encoder bị đứt ngầm một vài lõi, tín hiệu phản hồi về Driver sẽ bị chập chờn, gây ra lỗi AL011 (Encoder Error) hoặc làm motor quay không đều.
-
Giải pháp: Vệ sinh các đầu giắc bằng dung dịch Contact Cleaner. Nếu dây đã cũ, nên thay mới bằng loại cáp mềm chuyên dụng cho Servo.
3. Tham số Gain (Hệ số khuếch đại) chưa tối ưu
Nếu hệ số Gain quá cao hoặc quá thấp so với quán tính tải thực tế, motor sẽ không thể vận hành ổn định.
4. Nguồn cấp và Tụ lọc nguồn bị lão hóa
Sau 4-5 năm sử dụng, các tụ điện bên trong Driver Delta có thể bị khô, dẫn đến điện áp DC Bus không phẳng.
-
Biểu hiện: Motor chạy bình thường ở tốc độ thấp nhưng khi tăng tốc hoặc mang tải nặng sẽ bị rung hoặc báo lỗi AL003 (Low Voltage).
-
Khắc phục: Kiểm tra điện áp nguồn cấp 220V/380V xem có bị sụt áp đột ngột không. Nếu do linh kiện bên trong, cần tháo Driver để thay thế dàn tụ lọc nguồn chính.
5. Rơ-le điều khiển phanh (Brake) bị trễ
Đối với trục đứng có phanh điện từ, nếu rơ-le điều khiển phanh bị mòn tiếp điểm, phanh có thể nhả chậm hoặc đóng chậm.
-
Hiện tượng: Trục bị rơi nhẹ một đoạn trước khi giữ hoặc motor bị nóng do vừa chạy vừa bị phanh bó.
-
Khắc phục: Kiểm tra thời gian đóng/ngắt phanh trong tham số P1-42 và P1-43. Thay thế rơ-le trung gian điều khiển phanh nếu cần thiết.

Kỹ Thuật Xử Lý Lỗi Truyền Thông Và Kết Nối Mạng Delta Servo
Trong các hệ thống điều khiển hiện đại, thay vì dùng xung/chiều truyền thống, Servo Delta (đặc biệt là dòng A2, A3) thường được điều khiển qua mạng. Khi đường truyền bị gián đoạn, máy sẽ báo các lỗi như AL020 (Time-out) hoặc AL022 (Command Error).
1. Phân loại các lỗi truyền thông trên Delta
-
AL020 (Communication Time-out): Driver không nhận được dữ liệu từ PLC trong một khoảng thời gian nhất định (thường do dây cáp bị đứt hoặc nhiễu nặng).
-
AL022 (Communication Command Error): Driver nhận được dữ liệu nhưng lệnh đó không hợp lệ (sai cấu trúc hoặc sai địa chỉ thanh ghi).
-
Lỗi nháy đèn Link/Act: Đèn LED tín hiệu mạng nhấp nháy đỏ hoặc không sáng, báo hiệu mất kết nối vật lý lớp 1.
2. Chẩn đoán và xử lý lỗi kết nối vật lý
Với mạng EtherCAT hoặc Modbus, cáp kết nối là mắt xích yếu nhất:
-
Cáp mạng (RJ45): Phải sử dụng cáp mạng CAT5E hoặc CAT6 có bọc kim (SFTP). Các đầu bấm RJ45 phải là loại đầu kim loại để nối vỏ bọc kim xuống mass của Driver.
-
Điện trở đầu cuối (Termination Resistor): Với mạng RS485 (Modbus), nếu bạn kết nối nhiều Driver trên cùng một đường dây, bắt buộc phải có điện trở 120$Omega$ ở thiết bị cuối cùng để tránh hiện tượng phản xạ tín hiệu gây lỗi dữ liệu.
-
Khoảng cách và nhiễu: Cáp truyền thông tuyệt đối không được đi chung máng với cáp động lực (U, V, W). Nhiễu từ động cơ có thể làm sai lệch các bit dữ liệu, gây ra lỗi AL022.
3. Cấu hình tham số truyền thông (Nhóm P3)
Để Driver Delta có thể "nói chuyện" được với PLC, bạn cần cấu hình chính xác nhóm tham số P3:
-
P3-00 (Địa chỉ trạm - Station Address): Mỗi Driver trong mạng phải có một địa chỉ duy nhất (1, 2, 3...).
-
P3-01 (Tốc độ baud - Baud Rate): Phải khớp hoàn toàn với PLC (ví dụ: 9600, 19200, 115200 bps).
-
P3-02 (Định dạng dữ liệu - Protocol): Thiết lập chế độ 7,E,1 hoặc 8,N,2... tùy theo chuẩn của bộ điều khiển.
4. Kỹ thuật chống nhiễu chuyên sâu cho mạng EtherCAT (Dòng A2-E, A3-E)
Mạng EtherCAT chạy ở tốc độ cực cao, do đó rất nhạy cảm với xung nhiễu:
-
Lõi Ferrite: Kẹp lõi Ferrite vào cả hai đầu cáp mạng LAN nối giữa các Driver.
-
Grounding Plate: Sử dụng các tấm kẹp mass chuyên dụng để cố định lớp vỏ bọc kim của cáp mạng vào khung tủ điện.
-
Phần mềm ASDA-Soft: Sử dụng chức năng Communication Monitor để đếm số lượng gói tin bị lỗi (Error Counter). Nếu số này tăng liên tục, bạn cần thay cáp hoặc đi lại đường dây.
5. Cách ly tín hiệu bằng bộ chia/lặp (Repeater)
Trong môi trường nhà xưởng có nhiều máy hàn cao tần hoặc biến tần công suất lớn, việc sử dụng các bộ cách ly quang (Opto-Isolator) cho đường truyền RS485 là giải pháp tối ưu để bảo vệ chip truyền thông bên trong Driver Delta không bị cháy nổ khi có sự cố chập chạm nguồn điện.

Công ty Trần GIA tự hào là đơn vị hàng đầu cung cấp servo bảo hành lên tới 12 tháng dịch vụ sửa chữa, bảo trì Sửa chữa servo DELTA chập chờn không ổn định giá rẻ và tư vấn kỹ thuật trong lĩnh vực điện tử và thiết bị công nghiệp. Với đội ngũ kỹ thuật viên chuyên nghiệp, giàu kinh nghiệm, chúng tôi cam kết mang đến giải pháp tối ưu, chất lượng cao và giá cả hợp lý cho khách hàng. Trần GIA luôn đặt sự hài lòng của khách hàng lên hàng đầu, phục vụ nhanh chóng, tận tình và chuyên nghiệp. HOTLINE: 0913 56 739
Chúng tôi cam kết sử dụng linh kiện chính hãng, áp dụng các tiêu chuẩn kỹ thuật cao nhất nhằm đảm bảo độ bền và hoạt động ổn định của thiết bị sau sửa chữa. Trần GIA luôn đặt lợi ích của khách hàng lên hàng đầu bằng dịch vụ tư vấn tận tình, hỗ trợ nhanh chóng và chính sách bảo hành rõ ràng, minh bạch.
Vì sao chọn TRAN GIA Automation Sửa chữa servo DELTA chập chờn không ổn định giá rẻ
Linh kiện
Bảo hành
– Các khu vực chúng tôi chuyên cung cấp servo : Thành phố Hồ Chí Minh, Long An, Bình Dương, Bình Phước, Bà Rịa-Vũng Tàu, Tây Ninh, Tiền Giang, Tp. Cần Thơ, Sóc Trăng, Bến Tre, An Giang, Đồng Tháp, Kiên Giang, Vĩnh Long, Trà Vinh,…
– Sửa servo tận nơi: Tân Phú, Tân Bình, Gò Vấp, Quận 1, Quận 3, Thủ Đức, Quận 5, Quận 6, Bình Tân, Phú Nhuận, chợ Nhật Tảo, chợ Dân Sinh, KCN Thuận Đạo, KCN Tân Bình, KCN Vĩnh Lộc, KCN Lê Minh Xuân, KCN Mỹ Phước 1, KCN Mỹ Phước 2, KCN Mỹ Phước 3, KCN Sóng Thần, KCN Linh Trung, KCN Hiệp Phước, KCX Tân Thuận, KCN Tân Tạo, KCN Tân Phú Trung, KCN Tây Bắc Củ Chi, KCN Đông Nam, KCN Tân Phú Trung,….

Một số hình ảnh sửa servo đang trong quá trình sửa chữa tại TRAN GIA Automation