-
100% nhập khẩu chính hãng
-
100% nhập khẩu chính hãng
-
Thời gian nhập nhanh
-
Nâng cấp lên dòng cao nhất
Bảo hành
– Các khu vực chúng tôi chuyên cung cấp servo : Thành phố Hồ Chí Minh, Long An, Bình Dương, Bình Phước, Bà Rịa-Vũng Tàu, Tây Ninh, Tiền Giang, Tp. Cần Thơ, Sóc Trăng, Bến Tre, An Giang, Đồng Tháp, Kiên Giang, Vĩnh Long, Trà Vinh,…
– Sửa servo tận nơi: Tân Phú, Tân Bình, Gò Vấp, Quận 1, Quận 3, Thủ Đức, Quận 5, Quận 6, Bình Tân, Phú Nhuận, chợ Nhật Tảo, chợ Dân Sinh, KCN Thuận Đạo, KCN Tân Bình, KCN Vĩnh Lộc, KCN Lê Minh Xuân, KCN Mỹ Phước 1, KCN Mỹ Phước 2, KCN Mỹ Phước 3, KCN Sóng Thần, KCN Linh Trung, KCN Hiệp Phước, KCX Tân Thuận, KCN Tân Tạo, KCN Tân Phú Trung, KCN Tây Bắc Củ Chi, KCN Đông Nam, KCN Tân Phú Trung,….

Làm Chủ Vòng Phản Hồi Vị Trí: Sửa Lỗi Lệch Xung AL009 Và Phục Hồi Bộ Mã Hóa Encoder Trên Servo DELTA
Trong cấu trúc điều khiển vị trí (Position Control Mode), Servo DELTA hoạt động dựa trên cơ chế so sánh liên tục giữa số lượng xung lệnh phát ra từ bộ điều khiển trung tâm (PLC/CNC) gửi qua cổng CN1 và số lượng xung thực tế mà bộ mã hóa xung vòng quay (Encoder) trả về qua giắc CN2.
Nếu một trong hai tuyến tín hiệu này bị sai lệch dù chỉ $1$ xung ($1 ext{ Pulse}$), hệ thống sẽ tích lũy sai số sau mỗi chu kỳ chạy. Máy sẽ gặp hiện tượng chạy sai kích thước sản phẩm theo thời gian hoặc đột ngột sập lỗi dừng khẩn cấp để bảo vệ cơ cấu cơ khí.
1. Bản chất phần cứng: IC đệm vi sai (Line Driver) và Mạch lọc số ngõ vào (Digital Filter)
-
Tuyến nhận xung lệnh cổng CN1: DELTA sử dụng các IC nhận xung vi sai tốc độ cao (như
AM26LS32) để tiếp nhận các dòng lệnhPulse/SignhoặcCW/CCWtừ PLC. Khi linh kiện này bị suy giảm đặc tính tần số do nhiệt độ cao trong tủ điện, nó sẽ bị "sót" (trùng) các xung điện thế ngắn ở tần số cao, dẫn đến lỗiAL009khi máy tăng tốc nhanh. -
Tuyến phản hồi dòng xung Encoder cổng CN2: Đĩa mã hóa quang học bên trong Encoder cấu tạo từ các rãnh chia kính siêu nhỏ và bóng Led phát quang đối ứng với mắt nhận Photo-transistor. Khi bụi dầu cắt gọt lọt vào đuôi motor bám lên đĩa quang, hoặc Led phát quang bị già hóa giảm cường độ sáng, biên độ xung điện áp trả về Driver bị méo mó. CPU không thể giải mã được gói tin dữ liệu, Driver lập tức khóa đầu ra và báo lỗi phát ngắt
AL011.
2. Quy trình 4 bước hiệu chuẩn tín hiệu và Sửa chữa bo mạch phản hồi
1.Bước 1: Sửa chữa mạch nhận xung lệnh cao tần trên bo điều khiển:Thay chíp đệm vi sai.
• Khi hệ thống báo lỗi lệch vị trí AL009 nhưng cơ khí không bị kẹt hay rơ lỏng, hãy tháo rã bo điều khiển của Driver Delta.
• Lần theo các chân nhận xung lệnh HPULSE+ / HPULSE- của giắc CN1 dẫn vào bo mạch. Tìm con IC dán 16 chân AM26LS32 (hoặc họ tương đương). Tiến hành dùng máy khò nhiệt nhổ bỏ linh kiện dán cũ và hàn thay thế IC đệm vi sai mới để thông tuyến nhận xung sạch.
2.Bước 2: Kích hoạt bộ lọc số chống nhiễu xung lệnh bằng tham số:Cấu hình bộ lọc phần mềm.
• Nếu xung lệnh bị can nhiễu bởi tần số cao từ biến tần cạnh bên, hãy can thiệp bằng bộ lọc tích hợp của Delta thông qua tham số P1_37 (Pulse Đọc Filter).
• Mặc định giá trị thường đặt bằng 0 (Không lọc). Hãy tăng dần thông số này lên các mức tương ứng với tần số phát xung của PLC (Ví dụ: đặt bằng 2 để bật bộ lọc tần số thấp dưới $500 ext{kHz}$). Bộ lọc số sẽ tự động gạt bỏ các gai nhiễu điện áp nhọn bám trên đường dây cáp, xử lý dứt điểm pan trượt bước cơ khí.
3.Bước 3: Tháo rã phẫu thuật và Làm sạch mắt đọc quang học đuôi Motor:Vệ sinh đĩa quang Encoder.
• Với lỗi lỗi kết nối mã hóa AL011, hãy tháo ốp bảo vệ phía đuôi Motor để tiếp cận cụm Encoder. Cẩn thận tháo vỏ bọc nhựa bảo vệ đĩa kính.
• Dùng tăm bông y tế thấm một ít dung dịch cồn tuyệt đối ($99\%$ Alcohol) lau nhẹ nhàng bề mặt đĩa kính mã hóa và lăng kính mắt đọc để loại bỏ hoàn toàn màng dầu bám bẩn. Tuyệt đối không dùng các hóa chất tẩy rửa mạnh làm mờ vạch chia độ của đĩa quang.
4.Bước 4: Thay thế IC driver truyền thông Encoder và Đồng bộ dữ liệu:Ép lại code nhận diện.
• Nếu đã vệ sinh đĩa quang nhưng lỗi AL011 vẫn không hết, nguyên nhân do chết con IC lái dòng truyền thông Serial (thường là dòng chíp Max485 hoặc 75176 dán bên trong bo mạch đuôi Encoder).
• Tiến hành khò thay thế con IC giao tiếp này. Khi lắp đặt Encoder trở lại cốt Motor, bắt buộc phải căn chỉnh góc pha (Encoder Alignment) trùng với góc cực từ của nam châm vĩnh cửu trên Rotor, sau đó dùng chức năng khóa pha trên Driver để lưu vị trí gốc gốc tọa độ.
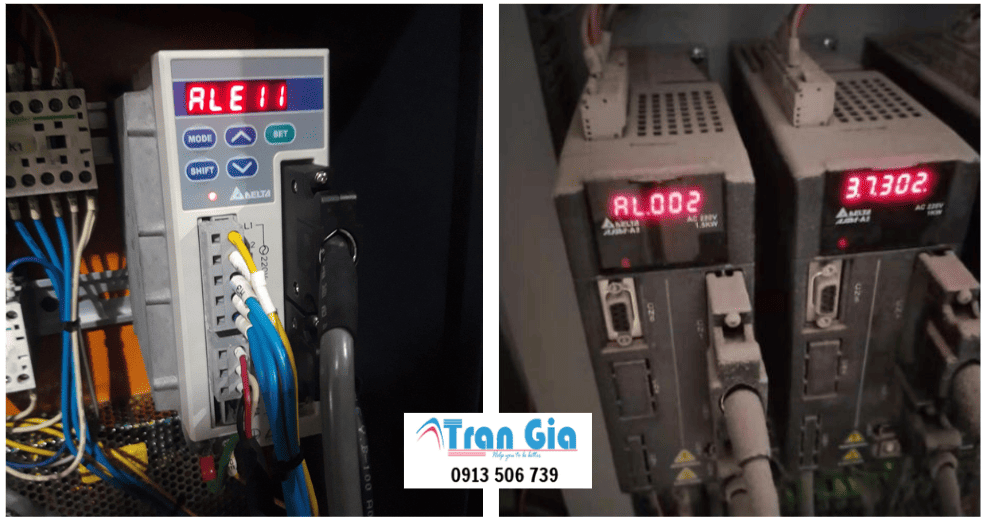
Chế Ngự Dòng Điện Nạp Đỉnh: Sửa Lỗi Thấp Áp AL002 Và Phục Hồi Tầng Khởi Động Mềm Trên Servo DELTA
Khối nguồn động lực (Power Supply Stage) là nơi tiếp nhận dòng điện xoay chiều ($220 ext{V}$ hoặc $380 ext{V}$), đi qua cầu chỉnh lưu để biến đổi thành dòng điện một chiều cao áp tích lũy trên giàn tụ hóa lớn (DC Bus).
Trên các dòng Servo DELTA, nếu mạch kiểm soát dòng nạp ban đầu (Inrush Current Control) bị tê liệt, Driver sẽ lập tức rơi vào trạng thái tự bảo vệ. Nhẹ thì hệ thống báo lỗi AL002 không cho máy vận hành, nặng thì dòng điện nạp kích thước lớn sẽ đánh sập Aptomat tổng hoặc làm nổ tung cầu chỉnh lưu ngay khi bạn vừa nhấn nút bật nguồn tủ điện.
1. Bản chất phần cứng: Điện trở giới hạn dòng mồi (Inrush Resistor) và Rơ-le đóng cắt bypass (Bypass Relay)
-
Mạch khởi động mềm (Soft-start Circuit): Khi Driver DELTA chưa bật nguồn, dàn tụ hóa DC Bus hoàn toàn rỗng điện lượng. Ngay tại thời điểm đóng điện, tụ hóa sẽ hoạt động như một mạch ngắn mạch (Short-circuit) hút dòng điện cực lớn để nạp đầy. Để bảo vệ bo mạch, hãng DELTA thiết kế một con Điện trở gốm công suất cao để giới hạn dòng điện nạp này ở mức an toàn.
-
Nguyên lý hoạt động của Bypass Relay: Sau khi điện áp trên tụ DC Bus đã được nạp đầy đến khoảng $90\%$ giá trị định mức (khoảng $310 ext{VDC}$ đối với lưới $220 ext{V}$), chip vi xử lý (CPU) sẽ xuất lệnh đóng một con Rơ-le (hoặc đèn bán dẫn Thyristor) đấu song song với con điện trở gốm. Con rơ-le này có nhiệm vụ "bắc cầu" (Bypass) ngắn mạch con điện trở lại, cho phép dòng điện động lực lớn chạy trực tiếp qua tiếp điểm rơ-le để nuôi motor kéo tải.
2. Quy trình 4 bước chẩn đoán mạch mồi nguồn và Thay thế linh kiện Driver DELTA
1.Bước 1: Kiểm tra điện trở gốm mồi hạn dòng và Cầu chỉnh lưu đầu vào:Đo thông mạch linh kiện bảo vệ.
• Chuyển đồng hồ vạn năng về thang đo điện trở ($Omega$). Tiến hành đo hai đầu của con điện trở gốm công suất (thường là khối sứ màu trắng nằm ngay cạnh rơ-le nguồn).
• Trị số chuẩn thường nằm trong khoảng $10 Omega - 47 Omega$. Nếu kim đồng hồ báo điện trở vô cùng ($infty$), điện trở mồi đã bị đứt cháy ngầm. Đồng thời đo kiểm tra 4 diode của cầu chỉnh lưu đầu vào xem có vế nào bị chập thông mạch hay không.
2.Bước 2: Phẫu thuật bóc tách và Thay thế Rơ-le Bypass (Inrush Relay):Kiểm tra tiếp điểm chịu tải.
• Nếu điện trở mồi bị đứt, nguyên nhân $90\%$ là do con Rơ-le Bypass bên cạnh bị hư hỏng (cháy cuộn hút $24 ext{V}$ hoặc rỗ tiếp điểm lực, không đóng lại được). Khi rơ-le không đóng, dòng điện kéo tải của motor buộc phải chạy liên tục qua con điện trở gốm nhỏ bé, khiến nó quá nhiệt và đứt tung.
• Tiến hành khò hút chân và thay thế Rơ-le mới chính hãng (thường là các dòng rơ-le chịu dòng cao của hãng OMRON hoặc Panasonic). Tuyệt đối không câu tắt chân rơ-le bằng dây đồng.
3.Bước 3: Đo dung lượng dàn tụ nguồn chính và Xử lý lỗi khô hóa chất:Thay thế tụ hóa DC Bus.
• Với lỗi thấp áp AL002 xuất hiện đột ngột khi motor vừa tăng tốc kéo tải nặng, vùng tổn thương nằm ở Dàn tụ hóa lọc nguồn chính. Qua nhiều năm hoạt động ở nhiệt độ cao, dung dịch điện phân trong tụ bị khô, làm giảm mạnh giá trị điện dung thực tế và tăng nội trở dòng ($ESR$).
• Dùng đồng hồ đo dung lượng chuyên dụng (LCR Meter) để đo kiểm tra. Thay thế toàn bộ dàn tụ hóa bằng các dòng tụ chuyên dụng cho Servo (chịu nhiệt độ $105^circ ext{C}$, điện áp tối thiểu $400 ext{V}$ hoặc $450 ext{V}$) để đảm bảo mạch Bus DC trữ đủ năng lượng bù áp khi motor dập tải.
4.Bước 4: Phục hồi mạch Opto quang giám sát ngưỡng điện áp thấp:Sửa mạch dò áp vi sai.
• Nếu đo điện áp thực tế trên chân P+ và N- đạt đủ mức điện áp chuẩn nhưng màn hình Driver vẫn khóa cứng báo lỗi AL002, nguyên nhân do lỗi Mạch cảm biến đo áp đầu về.
• Lần theo đường mạch dán nối từ Bus DC dẫn về IC so sánh, kiểm tra con Opto cách ly tuyến tính (thường là dòng mã HCPL-7840 hoặc TLP7820). Thay thế con Opto quang này cùng linh kiện IC khuếch đại thuật toán khuếch đại vi sai xung quanh để CPU nhận diện đúng giá trị áp thực.

Cẩm Nang Sửa Chữa Servo DELTA: Chuyên Thay Thế Board Mạch Và Linh Kiện Điện Tử Linh Hồn
Dòng AC Servo của hãng DELTA Electronics là "trái tim" trong rất nhiều hệ thống máy móc tại Việt Nam nhờ giá thành tối ưu, vòng quét lệnh nhanh và phần mềm cấu hình trực quan. Tuy nhiên, do phải hoạt động liên tục trong môi trường nhà xưởng nhiều bụi mịn, mạt sắt, và lưới điện hay bị trồi sụt, các khối linh kiện điện tử bên trong Driver Delta rất dễ bị tổn thương và lão hóa theo thời gian.
Khi Driver sập lỗi, việc chỉ thay thế cả bộ Driver mới thường rất tốn kém và mất thời gian chờ đợi đặt hàng. Phương án tối ưu nhất là bóc tách, chẩn đoán vùng tổn thương và tiến hành thay thế linh kiện dán mã gốc để phục hồi 100% hiệu suất của Driver.
II. Quy Trình 4 Bước Thay Thế Linh Kiện Bo Mạch Servo DELTA Tiêu Chuẩn
1.Bước 1: Cách ly bo mạch và Phẫu thuật khối công suất IGBT:Đo kiểm tra tĩnh nguội.
• Tắt nguồn, xả hết điện áp cao trên tụ Bus DC qua đèn tải. Tháo rời bo mạch lực (Power Board) ra khỏi vỏ nhôm.
• Dùng đồng hồ vạn năng đo kiểm tra các diode ngược của cầu van IGBT. Nếu phát hiện pha nào bị thông mạch ($0 Omega$), tiến hành dùng mỏ hàn nung dòng cao hoặc máy khò nhiệt dỡ bỏ module công suất cũ, làm sạch lớp keo tản nhiệt để chuẩn bị đóng chip mới.
2.Bước 2: Thay thế linh kiện tầng lái xung Gate (Gate Drive Circuit):Thay dàn Opto kích xung.
• Tuyệt đối không đóng IGBT mới vào ngay khi chưa kiểm tra mạch lái. Khi IGBT nổ, dòng điện cao áp sẽ đánh ngược về phá hủy chuỗi điện trở kích dán và IC Opto lái xung.
• Tiến hành nhổ bỏ và thay mới dàn IC Opto cách ly quang (HCPL-J312 hoặc dòng tương đương tùy model Delta). Thay thế các con điện trở dán ghim dòng chân $G$ (thường từ $10 Omega - 47 Omega$) để đảm bảo dạng sóng xung PWM vuông vắn, không bị méo.
3.Bước 3: Sửa chữa nguồn xung phụ SMPS và Hệ thống tụ lọc:Phục hồi nguồn điều khiển.
• Nếu Driver mất nguồn hoàn toàn (màn hình tối đen), vùng tổn thương nằm ở mạch nguồn xung. Kiểm tra van Mosfet đóng cắt nguồn sơ cấp và IC dao động (UC384x hoặc TOP series).
• Đo kiểm tra các mức nguồn ngõ ra: $+5 ext{V}$ nuôi vi xử lý, $+12 ext{V}$ nuôi quạt, và $+15 ext{V}$ nuôi mạch lái Gate. Tiến hành thay thế các tụ hóa nguồn phụ bị khô dầu, phù đầu nhằm triệt tiêu hiện tượng gợn sóng nhiễu điện áp.
4.Bước 4: Sửa bo điều khiển trung tâm và Ép lại chip nhớ EEPROM:Thay thế cổng giao tiếp.
• Đối với các ca bệnh lỗi truyền thông kết nối máy tính hoặc lỗi Encoder (AL011), tìm đến góc bo điều khiển (Control Board) nơi đặt chip thu phát dòng lệnh AM26LS31/32.
• Tiến hành thay thế IC vi sai này. Trong trường hợp Driver bị lỗi loạn tham số hoặc không lưu được cài đặt, tiến hành rã chíp nhớ 8 chân EEPROM (24Cxxx), dùng mạch nạp chuyên dụng nạp lại file Hex chuẩn của hãng Delta để cứu sống bo mạch.
III. Bí Quyết Kỹ Thuật: Giải Pháp Loại Bỏ Lỗi Quá Áp Ảo AL003 Trên Dòng ASDA-B2
????️ MẸO THỰC CHIẾN TỪ KỸ SƯ SỬA BO:
Dòng Servo Delta ASDA-B2 sau khoảng 3 - 5 năm vận hành rất hay gặp pan bệnh: Vừa bật nguồn lên, động cơ chưa kịp chạy hệ thống đã lập tức cắt cờ báo lỗi AL003 (Overvoltage). Đo điện áp lưới cấp vào hoàn toàn bình thường ($220 ext{V}$ hoặc $380 ext{V}$).
Nguyên nhân cốt lõi:
Lỗi này không phải do quá áp thật, mà do già hóa đường mạch dò áp (Voltage Sensing Circuit). Tuyến mạch này sử dụng một chuỗi gồm 3 đến 4 con điện trở dán có giá trị mega-ohm ($MOmega$) đấu nối tiếp nhau để hạ áp từ Bus DC về IC so sánh. Do môi trường ẩm, các con điện trở dán này bị tăng trị số nội bộ, làm sai lệch điện áp mẫu gửi về CPU, khiến máy hiểu lầm là điện áp đang bị quá tải.
Giải pháp xử lý dứt điểm: Rà soát chuỗi điện trở dán nằm gần dàn tụ nguồn chính. Tìm con trở nào có trị số hiển thị lệch so với mã vạch in trên thân (ví dụ mã 105 nghĩa là $1 ext{M}Omega$ nhưng đo ra $1.5 ext{M}Omega$). Thay thế bằng điện trở dán mới chuẩn trị số. Driver sẽ lập tức xóa lỗi AL003, hoạt động ổn định mà không cần can thiệp phần mềm.
IV. Kiểm Tra Động Lực Sau Thay Thế Qua Phần Mềm ASDA-Soft
Sau khi hoàn tất quá trình thay thế linh kiện phần cứng, Driver cần được kết nối với máy tính thông qua cáp USB/RS232 và phần mềm chuyên dụng ASDA-Soft để thực hiện các bước kiểm tra động lực cuối cùng:
-
Giám sát dòng điện không tải (Current Monitor): Cho Servo chạy ở chế độ JOG không tải, quan sát đồ thị dòng điện của 3 pha trên phần mềm. Nếu dòng điện 3 pha cân bằng và dưới mức $10\%$ dòng định mức, mạch kích xung và cảm biến dòng đã được sửa chữa hoàn hảo.
-
Kiểm tra độ suy giảm tín hiệu Encoder: Đọc số lượng xung lỗi tích lũy trên phần mềm để đảm bảo đường truyền truyền thông từ motor về bo mạch nhận không bị rớt gói tin (Drop packet).
 Cứu Nguy Mất Từ Tính Rotor: Sửa Lỗi Quá Tải AL006 Và Kỹ Thuật Cân Pha Đuôi Động Cơ Servo DELTA
Cứu Nguy Mất Từ Tính Rotor: Sửa Lỗi Quá Tải AL006 Và Kỹ Thuật Cân Pha Đuôi Động Cơ Servo DELTA
Trong các ứng dụng đòi hỏi chu kỳ chạy/dừng liên tục với gia tốc lớn (như máy dập tốc độ cao, cơ cấu trục dao máy cắt bay), động cơ Servo DELTA phải chịu một áp lực dòng điện cực lớn chạy qua các cuộn dây Stator để sinh lực từ trường xoắn kéo Rotor.
Nếu hệ thống làm mát của động cơ bị hỏng, hoặc máy bị kẹt cơ khí trong thời gian dài, nhiệt độ lõi động cơ sẽ vượt ngưỡng chịu đựng của nam châm vĩnh cửu. Hậu quả là động cơ bị biến thành một "khối sắt" giảm lực kéo, liên tục sập lỗi AL006 ngay khi vào tải nhẹ và phát nhiệt cực lớn ở thân Motor.
1. Bản chất phần cứng: Điểm Curie của nam châm đất hiếm và Góc lệch pha dòng (Commutation Offset)
-
Hiện tượng mất từ tính (Demagnetization): Động cơ Servo DELTA sử dụng nam châm đất hiếm NdFeB (Neodymium) trên Rotor để đạt mật độ từ thông cực cao với kích thước nhỏ gọn. Tuy nhiên, loại nam châm này có nhược điểm lớn là khả năng chịu nhiệt giới hạn. Khi nhiệt độ thấu lõi vượt quá Điểm Curie (hoặc ngưỡng lão hóa khoảng $140^circ ext{C} - 180^circ ext{C}$), cấu trúc sắp xếp của các miền từ thông bị phá vỡ vĩnh viễn. Động cơ sẽ bị mất từ trường, dòng điện tiêu thụ tăng vọt để bù lực dẫn đến báo lỗi quá dòng
AL001hoặc quá tảiAL006. -
Góc định vị cực từ (Commutation Angle): Để Driver cấp dòng điện 3 pha
U/V/Wvuông góc chính xác $90^circ$ điện từ trường đối ứng với cực Nam/Bắc của Rotor, nó dựa hoàn toàn vào tọa độ góc tuyệt đối được nạp sẵn bên trong chíp nhớ của Encoder. Nếu cơ cấu Encoder bị xoay lệch vị trí cơ khí so với trục động cơ (do va đập hoặc thợ tháo ra không đánh dấu), Driver sẽ cấp dòng điện lệch pha. Lúc này, dòng điện phóng ra rất lớn nhưng không tạo ra mô-men quay mà chỉ sinh ra nhiệt năng đốt cháy cuộn dây Stator.
2. Quy trình 4 bước kiểm tra từ tính và Hiệu chuẩn góc pha cực từ động cơ DELTA
1.Bước 1: Chẩn đoán độ suy giảm từ tính bằng phương pháp đo điện áp EMF:Đo suất điện động ngược.
• Để kiểm tra xem dòng nam châm trên Rotor còn tốt hay đã mất từ, hãy tách độc lập Motor ra khỏi Driver. Kẹp 3 đầu dây pha U, V, W vào 3 kênh của máy hiện sóng (Oscilloscope) hoặc dùng đồng hồ vạn năng để thang đo điện áp xoay chiều ($AC$).
• Dùng một motor khác kéo trục của Motor Delta quay đều với tốc độ khoảng $1000 ext{ vòng/phút}$ (hoặc dùng tay quay thật mạnh trục). Đọc giá trị điện áp phát ra (Suất điện động ngược - Back EMF). Đối chiếu với thông số Back EMF Constant trong catalogue của hãng. Nếu áp phát ra sụt giảm quá $20\%$, chứng tỏ Rotor đã bị mất từ tính, bắt buộc phải thay Rotor mới hoặc mang đi nạp từ lại bằng máy nạp xung từ trường cường độ cao.
2.Bước 2: Đo kiểm tra điện trở cuộn dây Stator và Cách ly rò vỏ:Kiểm tra cách điện cuộn dây.
• Khi động cơ bị quá nhiệt do mất từ, lớp sơn lót cách điện (Enamel) của dây đồng rất dễ bị bong tróc. Dùng đồng hồ đo trở kháng có độ chính xác cao (milli-ohm) đo cân bằng điện trở giữa 3 cặp pha U-V, V-W, W-U. 3 giá trị này phải trùng khít nhau.
• Dùng đồng hồ đo cách điện dòng cao (Megohmmeter) đặt ở mức $500 ext{VDC}$ để đo giữa các pha với vỏ Motor. Điện trở cách điện phải đạt trên $10 ext{M}Omega$. Nếu nhỏ hơn, cuộn dây đã bị om dột, phải tiến hành quấn lại Stator.
3.Bước 3: Hiệu chuẩn cơ khí điểm gốc Z-Phase của Encoder về vị trí chuẩn:Dò tìm điểm không điểm.
• Sau khi sửa chữa cuộn dây hoặc thay vòng bi, tiến hành gá cụm Encoder vào đuôi motor nhưng chưa siết chặt ốc định vị.
• Cấp một dòng điện một chiều giới hạn dòng ($12 ext{VDC}$ hoặc $24 ext{VDC}$) từ bộ nguồn phòng thí nghiệm vào hai pha bất kỳ (Ví dụ: Dương vào pha U, Âm vào pha V). Trục động cơ sẽ tự động xoay và khóa cứng tại một vị trí cố định gọi là Vị trí khóa từ (Magnetic Lock Position). Tiến hành xoay nhẹ vỏ Encoder cho đến khi kênh xung Z (xung gốc tọa độ) phát tín hiệu mức cao thì siết chặt ốc khóa cố định Encoder tại vị trí này.
4.Bước 4: Sử dụng phần mềm ASDA-Soft để chạy thuật toán dò góc pha Auto-Tuning:Học lại góc pha tự động.
• Kết nối Driver với máy tính. Mở phần mềm ASDA-Soft, truy cập vào mục Digital IO / Jog Control để kích hoạt chức năng chạy thử.
• Chuyển đến tham số cấu hình nâng cao và chọn tính năng Commutation Alignment (Dò góc pha tự động). Driver Delta sẽ tự động xuất các chuỗi xung dòng điện ngắn vào 3 pha để đo đạc và tự động ghi đè giá trị góc lệch pha (Offset Angle) tối ưu vào bộ nhớ trong của chíp Encoder. Khi phần mềm báo Success, motor đã được đồng bộ pha hoàn toàn, hoạt động êm, mát và đạt tối đa lực kéo định mức.
3. Khuyên dùng thực chiến: Cạm bẫy lỗi "Quá tải AL006" do cài sai hằng số quán tính tải
⚠️ SAI LẦM PHẦN MỀM KHIẾN MOTOR BỊ ĐỐT CHÁY OAN UỔNG:
Trong quá trình sửa chữa hoặc thay thế Driver mới cho hệ thống máy, rất nhiều trường hợp phần cứng động cơ và bo mạch hoàn toàn không có lỗi, nhưng cứ chạy máy tăng tốc là Driver báo lỗi dừng AL006 (Overload) sau vài giây.
Nguyên nhân cốt lõi do lỗi khai báo tham số Quán tính:
Driver Servo DELTA quản lý dòng điện xuất ra dựa trên việc tính toán tỷ lệ quán tính giữa tải cơ khí thực tế cấu thành bên ngoài và quán tính nội tại của Rotor động cơ. Tham số này được định nghĩa tại P1_37 (Ratio of Load Inertia to Servo Motor Inertia). Nếu cơ cấu cơ khí của bạn có bệ tải rất nặng (như bàn máy phay lớn hoặc lô cuốn thép) nhưng trong Driver lại khai báo hằng số quán tính này quá nhỏ (Ví dụ đặt bằng mặc định = 1.0), vòng điều khiển dòng của Driver sẽ tính toán sai dòng lệnh. Nó sẽ ép tầng công suất IGBT đẩy dòng đỉnh vào motor quá nhanh để ép tốc độ bám đuổi hành trình, tạo ra một làn sóng quá tải xung lượng bóp nghẹt động cơ.
Giải pháp khắc phục đúng kỹ thuật:
-
Sử dụng chức năng Auto-Tuning trên phần mềm ASDA-Soft để Driver tự động quay quét hành trình ngắn và tự tính toán tỷ lệ quán tính tải thực tế.
-
Hoặc tăng thủ công giá trị tham số
P1_37lên từng nấc (Ví dụ: nâng từ1.0lên5.0hoặc10.0tùy thuộc vào độ nặng của cơ cấu cơ khí). Khi giá trị quán tính được khai báo khớp với thực tế, Driver sẽ tự động tối ưu hóa đường cong gia tốc, dứt điểm lỗiAL006mà motor chạy rất êm, không bị nóng phát sinh.