Kiểm Soát Hệ Kín Delta ASDA: Sửa Lỗi Encoder AL011, Mất Phản Hồi Vị Trí AL026 Và Kỹ Thuật Triệt Tiêu Rung Lắc Trục
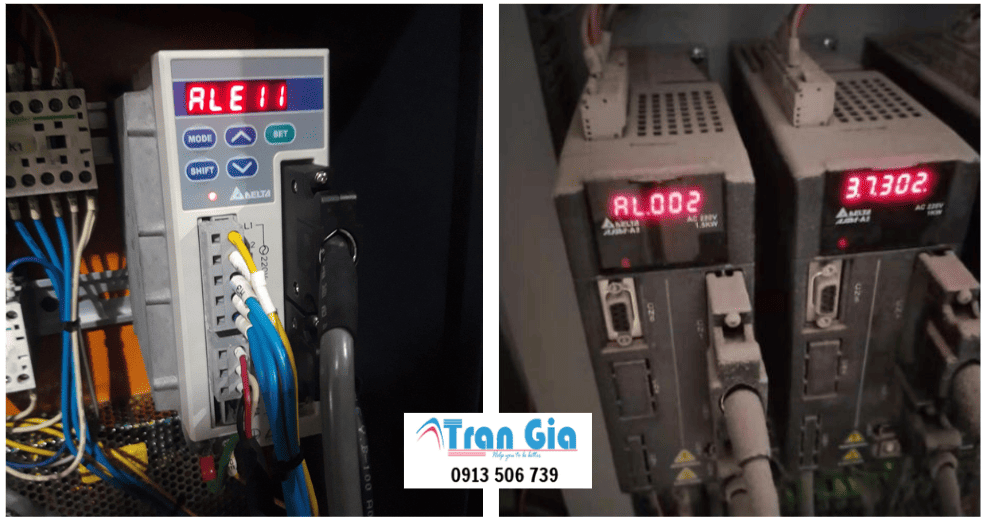
Trong cấu trúc điều khiển của Servo Delta, bộ mã hóa vòng quay Encoder (đĩa quang hoặc đĩa từ) đóng vai trò là "đôi mắt" tối thượng truyền dữ liệu vị trí và tốc độ về Driver theo thời gian thực thông qua giắc tín hiệu CN2. Khi tín hiệu này bị nhiễu, sai lệch khung dữ liệu hoặc mất đồng bộ cơ khí, chip xử lý trung tâm (DSP) của Delta sẽ lập tức kích hoạt cơ chế bảo vệ, khóa xung lực cắt dòng (Servo Off) để ngăn động cơ tự quay vô hạn (hiện tượng Runaway phá máy), đồng thời dập các mã cảnh báo sự cố nghiêm trọng.
1. Bản chất phần cứng: Cặp dòng thu phát vi sai, Góc kích từ và Tần số cộng hưởng cơ khí
-
Sự tổn thương của IC đệm thu phát vi sai (Differential Driver Overstress): Hệ thống Encoder Delta đời mới truyền dữ liệu tốc độ cao về Driver dưới dạng truyền thông nối tiếp sử dụng chuẩn vi sai RS-422 (T+, T-). Tín hiệu được tính toán bằng hiệu điện áp giữa hai dây dòng để triệt tiêu nhiễu đồng pha. Khi IC đệm thu phát vi sai trên bo mạch Driver (thường là các dòng chip AM26LS31 / AM26LS32) bị già hóa, sụt dòng hoặc bị điện áp xung nhiễu đánh thủng, xung vuông sẽ bị méo cạnh, sụt biên độ khiến CPU không thể giải mã, dẫn đến sập lỗi AL011.
-
Sự lệch hướng của góc pha từ tính (Commutation Angle Misalignment): Động cơ Servo đồng bộ nam châm vĩnh cửu (PMSM) bắt buộc phải biết chính xác vị trí cực từ của Rotor ngay khi vừa cấp nguồn để định hướng góc kích dòng Stator lệch pha đúng $90^circ$ điện, tạo ra mô-men kéo lớn nhất. Nếu Encoder bị lỏng ốc hãm, hoặc thợ sửa chữa tháo rã đuôi mô-tơ làm đĩa quang dịch chuyển dù chỉ $1^circ$, Driver sẽ bơm sai góc pha dòng điện. Kết quả là mô-tơ vừa bật lệnh chạy (Servo On) đã giật mạnh một cái, rú dòng dữ dội hoặc lắc rung bần bật rồi báo lỗi quá dòng.
2. Quy Trình 4 Bước Cô Lập Lỗi Tín Hiệu Và Triệt Tiêu Dao Động Trên Hệ Servo Delta
1.Bước 1: Cô lập đường truyền cáp nhiễu và Đo áp nguồn nuôi giắc CN2:Kiểm tra kết nối vật lý.
• Khi Servo báo lỗi AL011, lập tức tắt nguồn và kiểm tra giắc cắm tín hiệu đường Encoder (CN2). Tiến hành đo thông mạch từ Driver ra tận đuôi mô-tơ xem có bị đứt ngầm ruột đồng do xích nhựa (Drag Chain) co gập liên tục hay không.
• Đo điện áp nguồn nuôi cấp cho Encoder trực tiếp tại giắc. Điện áp bắt buộc phải nằm trong khoảng $4.95 ext{VDC} - 5.15 ext{VDC}$. Nếu áp bị sụt xuống dưới $4.75 ext{V}$ do cáp quá dài hoặc tổn hao đường dây, chip xử lý bên trong Encoder sẽ tự động ngừng phát dữ liệu, kích hoạt lỗi hệ thống.
2.Bước 2: Sử dụng dao động ký rà soát xung vi sai và Khử nhiễu EMI:Đo sóng vi sai.
• Sử dụng máy hiện sóng (Oscilloscope) đo vào các cặp chân nhận tín hiệu vi sai RS-422 trên bo mạch. Dạng sóng chuẩn phải là xung vuông sắc cạnh, đối xứng hoàn hảo, biên độ phẳng từ $2.5 ext{V} - 5 ext{V}$.
• Nếu xuất hiện các gai nhiễu điện từ trường do đi chung máng cáp với dây động lực biến tần, tiến hành tách ly máng dây và thực hiện tiếp địa bọc giáp chống nhiễu 360 độ cho vỏ cáp, kết hợp luồn cáp qua vòng từ Ferrite để gạn lọc nhiễu sạch.
3.Bước 3: Căn chỉnh lại góc kích từ tính (Commutation Angle Alignment):Calib góc kích từ.
• Nếu động cơ bị rã Encoder dẫn đến hiện tượng vừa bật lên chạy máy đã giật mạnh một cái rồi báo lỗi quá dòng hoặc rung lắc dữ dội, tức là góc pha từ tính đã bị lệch.
• Tiến hành bơm dòng điện một chiều cố định vào cuộn dây Stator để khóa cứng Rotor tại vị trí gốc tự nhiên ($0^circ$ điện). Giữ chặt trục và căn chỉnh đĩa Encoder (hoặc nạp lại giá trị offset trong chip nhớ thông qua phần mềm chuyên dụng) về đúng giá trị gốc pha định vị của nhà sản xuất.
4.Bước 4: Thiết lập bộ lọc vệt Notch Filter và Hạ thông số Speed Loop Gain:Lọc dải tần số.
• Để xử lý triệt để hiện tượng mô-tơ rên rít tần số cao hoặc rung giật cơ khí khi chạy tự động, truy cập vào phần mềm ASDA-Soft trên máy tính, bật chức năng phân tích đồ thị FFT để tìm tần số cộng hưởng của hệ thống khung cơ khí.
• Điền tần số lỗi vào bộ lọc vệt Notch Filter (Tham số P2-43 đến P2-46) để gạt bỏ dải tần gây rú máy. Nếu máy vẫn lắc vi mô, tiến hành hạ nhẹ hệ số khuếch đại vòng tốc độ P2-04 (Speed Loop Gain) xuống $15\% - 20\%$ để làm mượt đồ thị dòng điện ngõ ra.
3. Khuyên Dùng Thực Chiến: Pan bệnh lỗi sập mã vị trí AL026 do dầu làm mát ngấm vào khoang Encoder (Oil Contamination Failure)
????️ MẸO TRỊ BỆNH TỪ KỸ SƯ SỬA CHỮA PHẦN CỨNG SERVO CƠ ĐIỆN TỬ:
Một pan bệnh cực kỳ phổ biến trên các trục X, Z của máy phay CNC hoặc máy cắt gọt kim loại sử dụng động cơ Delta: Máy chạy buổi sáng rất êm, nhưng cứ đến cuối buổi chiều khi hệ thống phun dầu làm mát (Coolant Oil) hoạt động liên tục, Servo bắt đầu xuất hiện hiện tượng chạy giật cục, sai số kích thước sản phẩm và sập lỗi AL026 (Quá sai lệch vị trí) hoặc AL011. Tắt máy, lau chùi bên ngoài, sáng hôm sau bật lại chạy được vài tiếng rồi lại bị lặp lại.
Căn nguyên của hiện tượng khúc xạ ánh sáng đĩa quang do nhiễm dầu:
Nguyên nhân cốt lõi do Phớt chặn dầu (Oil Seal) ở đầu trục động cơ Servo sau nhiều năm sử dụng bị chai cứng, mất độ đàn hồi dưới tác động của nhiệt độ. Dưới áp lực của dung dịch dầu làm mát từ vòi phun bạt mạng, dầu bị rò rỉ ngấm dọc theo trục động cơ, đi xuyên qua khoang Stator và len lỏi vào tận khoang chứa Encoder ở đuôi mô-tơ.
Hầu hết Encoder Delta sử dụng công nghệ đĩa quang (Optical Encoder). Khi các giọt váng dầu bám vào bề mặt đĩa thủy tinh hoặc mắt đọc quang học, nó sẽ làm khúc xạ tia sáng LED, khiến các cảm biến hình ảnh nhận diện sai chuỗi vạch chia độ. Kết quả là số xung phản hồi gửi về bị mất mát ngẫu nhiên (ví dụ motor thực tế quay được 10 vòng nhưng Encoder chỉ đếm được 9 vòng). Driver thấy sai lệch giữa lệnh phát ra từ PLC và thực tế vượt ngưỡng cài đặt sẽ lập tức dập lỗi AL026 để bảo vệ an toàn hành trình.
Giải pháp khắc phục dứt điểm:
-
Rã khoang vệ sinh bằng dung dịch chuyên dụng: Tháo rời cụm Encoder ra khỏi đuôi motor. Tuyệt đối không dùng xăng thơm hoặc cồn công nghiệp nồng độ cao để lau đĩa quang vì sẽ làm bay màu hoặc chảy lớp mực in vạch chia độ dán trên đĩa. Bắt buộc phải sử dụng dung dịch Lau mạch nhanh khô chuyên dụng (như Contact Cleaner / Isopropyl Alcohol tinh khiết) và khăn vải sợi mịn không để lại tơ bông để nhẹ nhàng tẩy sạch lớp màng váng dầu bám trên đĩa thủy tinh và thấu kính mắt đọc.
-
Thay phớt chặn dầu Viton chịu hóa chất: Tiến hành thay thế phớt chặn dầu đầu trục motor bằng loại phớt vật liệu Cao su Flo (Viton/FKM) có lò xo ôm trục. Loại phớt này chịu được nhiệt độ cao trên $200^circ ext{C}$ và chống chịu hoàn toàn sự ăn mòn của hóa chất cắt gọt kim loại, ngăn ngừa tuyệt đối nguy cơ dầu tái nhiễm vào khoang xung, giúp động cơ chạy ổn định 24/7 không lo rớt mã vị trí.

Nguyên Sự Cố Mất Xung Phản Hồi Vị Trí Và Quy Trình 4 Bước Triệt Tiêu Dao Động Cơ Học Trên Servo Delta
I. CĂN NGUYÊN PHẦN CỨNG: BẢN CHẤT CỦA SỰ CỐ TÍN HIỆU TRÊN SERVO DELTA
-
Sự suy hao của cặp dòng thu phát vi sai (Differential Driver Failure): Hệ thống Encoder của Delta truyền dữ liệu tốc độ cao về giắc CN2 của Driver theo giao thức nối tiếp (Serial Communication) dựa trên cấu trúc vi sai RS-422 (T+, T-). Tín hiệu được tính toán bằng hiệu điện áp giữa hai dây chứ không phụ thuộc vào điện áp đất. Khi IC đệm thu phát vi sai trên bo mạch Driver (thường là chip họ AM26LS32) bị sụt dòng, xung dán bị méo cạnh, CPU sẽ không thể đọc được khung dữ liệu vị trí, kích hoạt lệnh ngắt lỗi AL011.
-
Trượt góc pha từ tính tự nhiên (Commutation Angle Shift): Động cơ Servo đồng bộ nam châm vĩnh cửu (PMSM) bắt buộc phải biết chính xác vị trí cực từ của Rotor ngay khi vừa cấp nguồn để định hướng góc kích dòng Stator lệch pha đúng $90^circ$ điện, tạo ra mô-men kéo lớn nhất. Góc offset này được calib bằng máy và lưu trong chip nhớ EEPROM của Encoder. Nếu cơ cấu cơ khí bị rơ lỏng, hoặc kỹ thuật viên tháo rã đuôi động cơ làm đĩa quang dịch chuyển dù chỉ $1^circ$, Driver sẽ bơm sai góc pha dòng điện, gây ra hiện tượng mô-tơ giật khựng, rú dòng dữ dội hoặc lắc rung bần bật khi vừa kích hoạt lệnh chạy.
II. QUY TRÌNH 4 BƯỚC KHẢO SÁT VÀ PHỤC HỒI ĐỘNG CƠ SERVO DELTA
1.Bước 1: Cô lập đường truyền cáp nhiễu và Đo áp nguồn nuôi giắc CN2:Kiểm tra kết nối vật lý.
• Khi Servo báo lỗi AL011, lập tức tắt nguồn và kiểm tra giắc cắm tín hiệu đường Encoder (CN2). Tiến hành đo thông mạch từ Driver ra tận đuôi mô-tơ xem có bị đứt ngầm ruột đồng do xích nhựa co gập liên tục hay không.
• Đo điện áp nguồn nuôi cấp cho Encoder trực tiếp tại giắc. Điện áp bắt buộc phải nằm trong khoảng $4.95 ext{VDC} - 5.15 ext{VDC}$. Nếu áp bị sụt xuống dưới $4.75 ext{V}$ do cáp quá dài, chip xử lý bên trong Encoder sẽ tự động ngừng phát dữ liệu, kích hoạt lỗi hệ thống.
2.Bước 2: Sử dụng dao động ký rà soát xung vi sai và Khử nhiễu EMI:Đo sóng vi sai.
• Sử dụng máy hiện sóng (Oscilloscope) đo vào các cặp chân nhận tín hiệu vi sai RS-422 trên bo mạch. Dạng sóng chuẩn phải là xung vuông sắc cạnh, đối xứng hoàn hảo, biên độ phẳng từ $2.5 ext{V} - 5 ext{V}$.
• Nếu xuất hiện các gai nhiễu điện từ trường do đi chung máng cáp với dây động lực biến tần, tiến hành tách ly máng dây và thực hiện tiếp địa bọc giáp chống nhiễu 360 độ cho vỏ cáp, kết hợp luồn cáp qua vòng từ Ferrite để gạn lọc nhiễu sạch.
3.Bước 3: Căn chỉnh lại góc kích từ tính (Commutation Angle Alignment):Calib góc kích từ.
• Nếu động cơ bị rã Encoder dẫn đến hiện tượng vừa bật lên chạy máy đã giật mạnh một cái rồi báo lỗi quá dòng hoặc rung lắc dữ dội, tức là góc pha từ tính đã bị lệch.
• Tiến hành bơm dòng điện một chiều cố định vào cuộn dây Stator để khóa cứng Rotor tại vị trí gốc tự nhiên ($0^circ$ điện). Giữ chặt trục và căn chỉnh đĩa Encoder (hoặc nạp lại giá trị offset trong chip nhớ thông qua phần mềm chuyên dụng) về đúng giá trị gốc pha định vị của nhà sản xuất.
4.Bước 4: Thiết lập bộ lọc vệt Notch Filter và Hạ thông số Speed Loop Gain:Lọc dải tần số.
• Để xử lý triệt để hiện tượng mô-tơ rên rít tần số cao hoặc rung giật cơ khí khi chạy tự động, truy cập vào phần mềm ASDA-Soft trên máy tính, bật chức năng phân tích đồ thị FFT để tìm tần số cộng hưởng của hệ thống khung cơ khí.
• Điền tần số lỗi vào bộ lọc vệt Notch Filter (Tham số P2-43 đến P2-46) để gạt bỏ dải tần gây rú máy. Nếu máy vẫn lắc vi mô, tiến hành hạ nhẹ hệ số khuếch đại vòng tốc độ P2-04 (Speed Loop Gain) xuống $15\% - 20\%$ để làm mượt đồ thị dòng điện ngõ ra.
III. BÍ QUYẾT THỰC CHIẾN: PAN BỆNH LỖI SẬP MÃ VỊ TRÍ AL026 DO DẦU LÀM MÁT NGẤM VÀO KHOANG ENCODER (OIL CONTAMINATION FAILURE)
????️ MẸO TRỊ BỆNH TỪ KỸ SƯ SỬA CHỮA PHẦN CỨNG SERVO CƠ ĐIỆN TỬ:
Một pan bệnh cực kỳ phổ biến trên các trục X, Z của máy phay CNC hoặc máy cắt gọt kim loại sử dụng động cơ Delta: Máy chạy buổi sáng rất êm, nhưng cứ đến cuối buổi chiều khi hệ thống phun dầu làm mát (Coolant Oil) hoạt động liên tục, Servo bắt đầu xuất hiện hiện tượng chạy giật cục, sai số kích thước sản phẩm và sập lỗi AL026 (Quá sai lệch vị trí) hoặc AL011. Tắt máy, lau chùi bên ngoài, sáng hôm sau bật lại chạy được vài tiếng rồi lại bị lặp lại.
Căn nguyên của hiện tượng khúc xạ ánh sáng đĩa quang do nhiễm dầu:
Nguyên nhân cốt lõi do Phớt chặn dầu (Oil Seal) ở đầu trục động cơ Servo sau nhiều năm sử dụng bị chai cứng, mất độ đàn hồi dưới tác động của nhiệt độ. Dưới áp lực của dung dịch dầu làm mát từ vòi phun bạt mạng, dầu bị rò rỉ ngấm dọc theo trục động cơ, đi xuyên qua khoang Stator và len lỏi vào tận khoang chứa Encoder ở đuôi mô-tơ.
Hầu hết Encoder Delta sử dụng công nghệ đĩa quang (Optical Encoder). Khi các giọt váng dầu bám vào bề mặt đĩa thủy tinh hoặc mắt đọc quang học, nó sẽ làm khúc xạ tia sáng LED, khiến các cảm biến hình ảnh nhận diện sai chuỗi vạch chia độ. Kết quả là số xung phản hồi gửi về bị mất mát ngẫu nhiên (ví dụ motor thực tế quay được 10 vòng nhưng Encoder chỉ đếm được 9 vòng). Driver thấy sai lệch giữa lệnh phát ra từ PLC và thực tế vượt ngưỡng cài đặt sẽ lập tức dập lỗi AL026 để bảo vệ an toàn hành trình.
Giải pháp khắc phục dứt điểm:
-
Rã khoang vệ sinh bằng dung dịch chuyên dụng: Tháo rời cụm Encoder ra khỏi đuôi motor. Tuyệt đối không dùng xăng thơm hoặc cồn công nghiệp nồng độ cao để lau đĩa quang vì sẽ làm bay màu hoặc chảy lớp mực in vạch chia độ dán trên đĩa. Bắt buộc phải sử dụng dung dịch Lau mạch nhanh khô chuyên dụng (như Contact Cleaner / Isopropyl Alcohol tinh khiết) và khăn vải sợi mịn không để lại tơ bông để nhẹ nhàng tẩy sạch lớp màng váng dầu bám trên đĩa thủy tinh và thấu kính mắt đọc.
-
Thay phớt chặn dầu Viton chịu hóa chất: Tiến hành thay thế phớt chặn dầu đầu trục motor bằng loại phớt vật liệu Cao su Flo (Viton/FKM) có lò xo ôm trục. Loại phớt này chịu được nhiệt độ cao trên $200^circ ext{C}$ và chống chịu hoàn toàn sự ăn mòn của hóa chất cắt gọt kim loại, ngăn ngừa tuyệt đối nguy cơ dầu tái nhiễm vào khoang xung, giúp động cơ chạy ổn định 24/7 không lo rớt mã vị trí.

Khống Chế Động Năng Trục Máy Delta ASDA: Sửa Lỗi Quá Áp AL002, Xử Lý Khối Xả HÃM REGEN Và Kỹ Thuật Đấu Nối Điện Trở Ngoài
Trong các cơ cấu chuyển động có chu kỳ tăng giảm tốc liên tục hoặc quán tính cơ khí lớn (như mâm xoay định vị, lô cuộn xả cuộn, trục Z mang tải nặng xuống dốc), động cơ AC Servo Delta hoạt động luân phiên giữa hai trạng thái: Chế độ động cơ (Motoring Mode) và Chế độ phát điện (Regenerative Mode).
Khi Driver phát lệnh giảm tốc đột ngột, động năng còn dư thừa của hệ thống cơ khí sẽ biến mô-tơ thành một máy phát điện vô hạn, đẩy ngược dòng năng lượng điện áp cao theo đường cáp động lực về lại Driver. Nếu năng lượng phản hồi này vượt quá khả năng hấp thụ của dàn tụ hóa, điện áp trên đường Bus DC sẽ tăng vọt, kích hoạt lệnh bảo vệ và dập các mã lỗi nguy hiểm: AL002 (Overvoltage - Quá điện áp Bus DC) hoặc AL005 (Regeneration Error - Quá tải điện trở xả).
1. Bản chất phần cứng: Van bán dẫn đóng cắt xả (Regen Mosfet), Điện trở nội bo và Sự quá nhiệt xung
-
Sự phá hủy của IGBT/Mosfet kích xả (Brake Chopper Failure): Để bảo vệ dàn tụ không bị nổ do quá áp, bên trong Driver Delta luôn tích hợp sẵn một mạch dập áp (Brake Chopper Module). Mạch này sử dụng một van bán dẫn công suất lớn đóng vai trò làm công tắc đóng cắt. Khi điện áp Bus DC vọt lên ngưỡng giới hạn (khoảng $740 ext{VDC}$ đối với Driver dòng điện $380 ext{V}$), CPU phát lệnh kích mở van bán dẫn này để xả toàn bộ điện áp dư thừa sang thanh điện trở sứ tiêu tán thành nhiệt năng. Nếu van này bị chập chết vĩnh viễn, điện trở xả sẽ bị ngâm dòng liên tục và cháy đỏ rực đến khi đứt rời.
-
Sự quá giới hạn công suất của điện trở tích hợp sẵn (Internal Resistor Saturation): Mặc định nhà sản xuất Delta luôn lắp sẵn một thanh điện trở dán hoặc điện trở sứ nhỏ bên trong Driver. Thanh điện trở này chỉ chịu được các chu kỳ xả ngắn với quán tính nhỏ. Khi người sử dụng nâng cấp cơ cấu cơ khí nặng hơn hoặc tăng tốc độ máy (nhịp tăng giảm tốc dưới $0.5$ giây), lượng nhiệt tích tụ trên điện trở nội vượt ngưỡng giải nhiệt tự nhiên, khiến Driver dội lỗi AL005 để ngăn cháy nổ bo mạch.
2. Quy Trình 4 Bước Khảo Sát Và Đấu Nối Nâng Cấp Điện Trở Xả Ngoài Cho Servo Delta
1.Bước 1: Đo kiểm nguội trạng thái sống chết của van bán dẫn Brake Chopper:Đo kiểm van kích xả.
• Ngắt toàn bộ nguồn điện, đợi 10 phút để dàn tụ hóa xả hết điện (đo kiểm tra áp chân P+ và N- về dưới $20 ext{VDC}$). Chuyển vạn năng sang nấc đo Diode.
• Đặt que đo vào chân P+ và chân D (hoặc chân B1 tùy dòng máy). Nếu vạn năng kêu "tít" liên tục hoặc hiển thị ôm bằng $0$, van kích xả bên trong Driver đã bị chập thông mạch hoàn toàn. Phải thay thế con IGBT/Mosfet kích hãm này trước khi cấp nguồn lại, nếu không sẽ làm cháy đứt bất kỳ điện trở nào đấu vào.
2.Bước 2: Gỡ bỏ thanh chập cầu ngắn mạch mạch điện trở nội bo:Cô lập điện trở nội.
• Để chuyển sang sử dụng điện trở xả công suất lớn bên ngoài, bắt buộc phải cô lập điện trở nhỏ bên trong Driver để tránh hiện tượng quá nhiệt chéo.
• Tiến hành tháo thanh cầu nối (Jumper) liên kết giữa chân P+ và D (hoặc chân B2 và B3 trên dòng dòng Delta ASDA-B2). Việc gỡ bỏ Jumper này sẽ ngắt hoàn toàn điện trở nội ra khỏi mạch xung lực.
3.Bước 3: Tính toán chọn lựa Trị số Ôm, Công suất và Đấu nối điện trở nhôm ngoài:Tính toán đấu nối ngoài.
• Đấu nối hai đầu dây của thanh điện trở nhôm ngoài vào hai chân P+ và C trên Driver Delta.
• Quy tắc chọn điện trở: Trị số Điện trở ($Omega$) không được phép nhỏ hơn giá trị tối thiểu mà hãng quy định (tra cứu catalog của từng công suất Driver, thông thường dòng họ $1 ext{kW}$ dùng loại từ $40 Omega - 60 Omega$). Công suất của điện trở nhôm ngoài ($W$) nên chọn lớn gấp 2 đến 3 lần công suất điện trở nội (ví dụ nâng cấp lên loại nhôm vàng $400 ext{W} - 60 Omega$) để tăng diện tích tản nhiệt và khả năng chịu xung dòng.
4.Bước 4: Cấu hình lại Tham số khai báo xả hãm ngoài trên phần mềm ASDA-Soft:Cấu hình tham số.
• Bật nguồn Driver, kết nối phần mềm máy tính, tìm đến nhóm tham số cấu hình mạch hãm tái sinh: Tham số P1-52 (Regenerative Resistor Resistance) và P1-53 (Regenerative Resistor Capacity).
• Nhập chính xác trị số Ôm của điện trở mới vào P1-52 và giá trị công suất (Wát) vào P1-53. Việc khai báo chính xác này giúp CPU Delta kích hoạt thuật toán giám sát nhiệt độ tích lũy thông minh, triệt tiêu hoàn toàn mã lỗi AL002 và AL005.

Một số hình ảnh sửa servo đang trong quá trình sửa chữa tại TRAN GIA Automation





Công ty Trần GIA tự hào là đơn vị hàng đầu cung cấp servo bảo hành lên tới 12 tháng dịch vụ sửa chữa, bảo trì Sửa Động Cơ Servo Delta Lỗi Encoder, Mất Phản Hồi Vị Trí, Rung Lắc – Dịch Vụ Căn Chỉnh Góc Kích Từ Tính Lấy Ngay và tư vấn kỹ thuật trong lĩnh vực điện tử và thiết bị công nghiệp. Với đội ngũ kỹ thuật viên chuyên nghiệp, giàu kinh nghiệm, chúng tôi cam kết mang đến giải pháp tối ưu, chất lượng cao và giá cả hợp lý cho khách hàng. Trần GIA luôn đặt sự hài lòng của khách hàng lên hàng đầu, phục vụ nhanh chóng, tận tình và chuyên nghiệp. HOTLINE: 0913 56 739
Chúng tôi cam kết sử dụng linh kiện chính hãng, áp dụng các tiêu chuẩn kỹ thuật cao nhất nhằm đảm bảo độ bền và hoạt động ổn định của thiết bị sau sửa chữa. Trần GIA luôn đặt lợi ích của khách hàng lên hàng đầu bằng dịch vụ tư vấn tận tình, hỗ trợ nhanh chóng và chính sách bảo hành rõ ràng, minh bạch.
Vì sao chọn TRAN GIA Automation Sửa Động Cơ Servo Delta Lỗi Encoder, Mất Phản Hồi Vị Trí, Rung Lắc – Dịch Vụ Căn Chỉnh Góc Kích Từ Tính Lấy Ngay
-
100% nhập khẩu chính hãng
Bảo hành
– Các khu vực chúng tôi chuyên cung cấp servo : Thành phố Hồ Chí Minh, Long An, Bình Dương, Bình Phước, Bà Rịa-Vũng Tàu, Tây Ninh, Tiền Giang, Tp. Cần Thơ, Sóc Trăng, Bến Tre, An Giang, Đồng Tháp, Kiên Giang, Vĩnh Long, Trà Vinh,…
– Sửa servo tận nơi: Tân Phú, Tân Bình, Gò Vấp, Quận 1, Quận 3, Thủ Đức, Quận 5, Quận 6, Bình Tân, Phú Nhuận, chợ Nhật Tảo, chợ Dân Sinh, KCN Thuận Đạo, KCN Tân Bình, KCN Vĩnh Lộc, KCN Lê Minh Xuân, KCN Mỹ Phước 1, KCN Mỹ Phước 2, KCN Mỹ Phước 3, KCN Sóng Thần, KCN Linh Trung, KCN Hiệp Phước, KCX Tân Thuận, KCN Tân Tạo, KCN Tân Phú Trung, KCN Tây Bắc Củ Chi, KCN Đông Nam, KCN Tân Phú Trung,….