Mắt Thần Vòng Kín: Sửa Lỗi Truyền Thông Encoder A.C90 Và Phục Hồi Lỗi Pin Tuyệt Đối A.810 Trên Servo YASKAWA
Trong khi các hãng Servo khác có thể sử dụng tín hiệu xung vuông thông thường, YASKAWA lại là hãng tiên phong sử dụng công nghệ Encoder truyền thông Serial tốc độ cao (17-bit trên Sigma-5 và 24-bit trên Sigma-7). Toàn bộ dữ liệu về vị trí, tốc độ, nhiệt độ của Motor được mã hóa thành các gói dữ liệu số và truyền liên tục về Driver qua một cặp dây vi sai duy nhất với tốc độ lên tới vài chục Megabit/giây.
Chính vì mật độ truyền tải dữ liệu cực cao, hệ thống phản hồi của YASKAWA rất nhạy cảm với sự suy hao linh kiện điện tử dán trên bo mạch và sự biến động điện áp nguồn nuôi, dẫn đến hai mã lỗi "ám ảnh" kỹ sư bảo trì dưới đây.
1. Bản chất phần cứng: Mạch thu phát Serial và Mạch duy trì bộ nhớ đa vòng
-
Lỗi A.C90 (Encoder Communications Error): Tín hiệu từ Encoder truyền về giắc CN2 bị méo dạng hoặc mất gói tin. Nguyên nhân có thể do IC thu phát dữ liệu vi sai (Transceiver chíp dán mã như MAX485 hoặc SN75176) trên bo khiển Driver bị lão hóa, hoặc do chíp phát tín hiệu (Driver IC) bên trong hộp nhôm của cụm Encoder ở đuôi Motor bị lỗi do quá nhiệt.
-
Lỗi A.810 (Encoder Backup Battery Error): Khi hệ thống chạy ở chế độ Absolute (Tọa độ tuyệt đối), bộ đếm số vòng quay của Motor (Multi-turn Counter) phải được duy trì liên tục bởi một viên Pin Lithium $3.6 ext{V}$ gắn ngoài, kể cả khi ngắt nguồn tổng của máy. Nếu áp Pin sụt xuống dưới ngưỡng an toàn, bộ đếm bị reset, Driver lập tức báo lỗi A.810 và khóa cứng lệnh chạy để tránh việc máy chạy sai hành trình gây đâm dao hoặc va đập cơ khí.
2. Quy trình 4 bước cô lập và sửa chữa lỗi phản hồi Encoder YASKAWA
1.Bước 1: Đo kiểm áp nguồn 5V và thông mạch đường truyền vi sai:Săn lùng hiện tượng sụt áp.
• Sử dụng đồng hồ vạn năng đo trực tiếp tại hai chân nguồn cấp cho Encoder trên giắc CN2 (Chân 5V và 0V). Áp tiêu chuẩn bắt buộc phải đạt từ $4.95 ext{VDC} - 5.15 ext{VDC}$. Nếu áp tụt xuống dưới $4.75 ext{V}$, chip xử lý của Encoder sẽ bị khởi động lại liên tục, gây ra lỗi A.C90.
• Dùng thang đo thông mạch để kiểm tra cặp dây tín hiệu vi sai (PG DATA và PG /DATA). Nếu cáp chạy trong máng xích di động lâu ngày bị bong tróc lưới bọc kim, nhiễu cao tần từ dây động lực sẽ tràn vào bẻ gãy gói tin dữ liệu.
2.Bước 2: Thay thế IC đệm vi sai truyền thông trên bo điều khiển:Can thiệp linh kiện dán SMD.
• Nếu kiểm tra dây cáp và Motor khác vẫn bị lỗi A.C90, pan bệnh nằm trực tiếp ở mạch nhận tín hiệu trên Driver.
• Tiến hành tháo bo điều khiển (Control Board), lần từ chân giắc cắm CN2 vào sâu bên trong mạch để tìm con IC đệm vi sai 8 chân. Dùng máy khò nhiệt dứt khoát nhấc IC cũ ra, vệ sinh sạch chân mạch bằng cồn IPA và hàn thế con IC thu phát tốc độ cao mới vào vị trí để phục hồi tính năng giải mã xung dữ liệu.
3.Bước 3: Thay Pin 3.6 ext{V} chuẩn công nghiệp không mất gốc máy:Quy trình thay Pin cứu dữ liệu.
• Khi xử lý lỗi A.810, hãy chuẩn bị sẵn viên pin Lithium dòng xả ổn định (như dòng pin YASKAWA JZSP-BA01 hoặc ER17330).
• Mẹo thực chiến cực kỳ quan trọng: Luôn luôn tiến hành thay pin khi máy đang bật nguồn điện tổng. Nếu bạn rút pin cũ ra khi máy đang tắt nguồn hoàn toàn, bộ đếm đa vòng trong Encoder sẽ bị mất điện đột ngột, làm xoá sạch toàn bộ tọa độ gốc của máy, buộc bạn phải làm lại quy trình căn chỉnh máy vô cùng phức tạp.
4.Bước 4: Reset bộ nhớ lỗi Encoder bằng phần mềm SigmaWin+:Đồng bộ hóa lệnh từ Driver.
• Sau khi đã thay pin mới hoặc sửa xong phần cứng, lỗi A.810 hoặc A.C90 vẫn sẽ được Encoder giữ chặt trong bộ nhớ đệm lỗi nội bộ (Error Flag).
• Kết nối máy tính qua phần mềm chuyên dụng SigmaWin+, truy cập vào menu Setup -> chọn mục Encoder Setting -> Kích hoạt lệnh Reset Absolute Encoder (hoặc Clear Multi-turn Bound). Driver sẽ phát một chuỗi xung mã hóa xuống Encoder để xóa sạch bộ nhớ lỗi cũ, trả trạng thái Driver về chữ bb (Base Block) sẵn sàng hoạt động.
3. Giải pháp chống nhiễu chuyên sâu cho đường truyền xung YASKAWA
????️ MẸO THỰC CHIẾN XỬ LÝ NHIỄU CAO TẦN TRÊN DÒNG SIGMA-7:
Hệ thống Servo YASKAWA thế hệ mới chạy xung Serial với tần số cực cao, rất dễ bị ảnh hưởng bởi sóng hài điện từ (EMI) phát ra từ các nguồn xung điều khiển cận kề hoặc do hệ thống tiếp địa của nhà xưởng không đạt chuẩn.
Biện pháp dập nhiễu triệt để:
-
Vỏ giắc cắm bằng kim loại của đầu cáp CN2 phải được hàn tiếp xúc trực tiếp $360^circ$ với lớp lưới đồng chống nhiễu của dây cáp.
-
Đóng bổ sung một cọc tiếp địa độc lập dành riêng cho tủ điện điều khiển chứa Servo YASKAWA. Điện trở đất đo bằng đồng hồ chuyên dụng phải nhỏ hơn $4 Omega$. Không đấu chung dây tiếp địa của Servo với dây tiếp địa của máy hàn dòng lớn hoặc máy dập xung lực để tránh hiện tượng dòng nhiễu đất xông ngược về phá hỏng Encoder.

Khống Chế Dòng Động Lực: Trị Lỗi Quá Dòng A.100 Và Ngắn Mạch A.120 Trên Servo YASKAWA
Khi màn hình LED của Driver YASKAWA hiển thị đỏ rực mã lỗi A.100 hoặc A.120, điều đó đồng nghĩa với việc dòng điện chạy qua các thanh đồng $DC Bus$ hoặc đi ra 3 pha Motor đã vượt quá ngưỡng chịu đựng của linh kiện bán dẫn (thường lớn hơn $200\%$ dòng định mức của Driver).
YASKAWA quản lý dòng điện này thông qua hệ thống cảm biến dòng điện độ nhạy cao kết hợp mạch phản hồi siêu tốc về chip DSP. Chỉ cần một xung dòng dị thường kéo dài vài phần triệu giây ($mu ext{s}$), hệ thống sẽ lập tức khóa cứng.
1. Bản chất phần cứng: Mạch dò dòng CT và Tầng bảo vệ biến thiên điện áp (Desat)
-
Bộ biến dòng cảm biến Hall (Current Transformer - CT): Trên các pha ngõ ra U, V, W của Driver YASKAWA luôn được lồng qua các vòng xuyến cảm biến dòng từ trường (thường là linh kiện của hãng Kohshin hoặc Tamura). Cảm biến này biến đổi dòng điện xoay chiều siêu lớn thành tín hiệu điện áp Analog siêu nhỏ ($0 - 5 ext{V}$) gửi về bo khiển. Nếu cảm biến CT bị hỏng, lệch mốc $0 ext{V}$ (Offset Error), Driver sẽ báo lỗi A.100 ngay giây đầu tiên bật nguồn dù Motor chưa kịp nhúc nhích.
-
Mạch bảo vệ sụt áp Gate (Desaturation Protection): Tích hợp thẳng vào các IC Opto lái Gate chuyên dụng (như dòng ACPL-332J). Mạch này liên tục đo điện áp giữa hai cực $C-E$ của đèn công suất IGBT khi đang dẫn dòng. Nếu IGBT bị chập hoặc Motor bị ngắn mạch, điện áp này tăng vọt lên, IC lái Gate sẽ lập tức dập tắt xung kích trong vòng $2 ext{ }mu ext{s}$ và phát lệnh báo lỗi A.120 về CPU trước khi IGBT bị phá hủy nhiệt.
2. Quy trình 4 bước cô lập lỗi và sửa chữa tầng động lực YASKAWA
1.Bước 1: Kiểm tra cuộn dây Motor và cáp động lực:Cô lập Motor và Drive.
• Tháo giắc cắm động lực 3 pha U, V, W ra khỏi Driver. Dùng đồng hồ đo điện trở cách điện (Megohmmeter) đo từ các pha ra vỏ Motor để kiểm tra lỗi rò điện đất (Ground Fault).
• Dùng đồng hồ vạn năng đo điện trở cân bằng giữa các cặp pha U-V, V-W, W-U. Điện trở phải hoàn toàn cân bằng (thường chỉ vài $Omega$). Nếu điện trở lệch nhau hoặc bằng $0 Omega$, Motor đã bị chập cuộn dây, đây là nguyên nhân trực tiếp kéo theo lỗi A.120.
2.Bước 2: Đo kiểm tra tầng công suất IGBT khi không có tải:Phát hiện lỗi tĩnh Driver.
• Khi đã rút Motor ra, bật nguồn Driver lên. Nếu Driver hết báo lỗi và chuyển sang trạng thái bb (Base block), lỗi nằm ở Motor hoặc cáp động lực.
• Nếu rút giắc Motor ra mà vừa bật nguồn Driver đã báo ngay lỗi A.100 hoặc A.120, khẳng định $100\%$ bo mạch Driver đã bị hỏng chập bên trong. Tiến hành đo nguội xem IGBT có bị đánh thủng hay không (như quy trình đo Diode thuận nghịch ở cẩm nang trước).
3.Bước 3: Sửa chữa mạch khuếch đại dòng Analog (Mạch CT):Sửa mạch phản hồi dòng.
• Trường hợp IGBT còn sống tốt nhưng Driver vẫn báo A.100, pan bệnh nằm ở mạch đọc dòng Analog bị sai lệch.
• Tìm đến cụm cảm biến dòng Hall ở ngõ ra, kiểm tra các nguồn cấp phụ $+15 ext{V}$ và $-15 ext{V}$ nuôi cảm biến. Lần theo đường mạch về bo khiển, thay thế các IC khuếch đại thuật toán dán dẹt (Op-Amp như dòng TL084 hoặc LM324) – các con IC này chuyên làm nhiệm vụ xử lý tín hiệu dòng điện, khi bị lão hóa sẽ khiến điện áp mốc bị lệch, lừa chip CPU báo lỗi quá dòng giả.
4.Bước 4: Thay thế IC lái tích hợp mạch dò Desat bảo vệ van:Phục hồi Opto dập xung ngắn mạch.
• Nếu Driver báo lỗi ngắn mạch A.120, tiến hành khò thay thế loạt IC Opto lái Gate dán (thường là mã ACPL-332J hoặc tương đương).
• Đồng thời, đo rà soát các diode dòng ngược tốc độ cao (Fast Recovery Diode) nối từ chân bảo vệ của Opto về cực C của IGBT. Nếu con diode này bị chập, mạch bảo vệ Desat luôn bị kích hoạt sai, khóa cứng Driver ở lỗi A.120. Thay thế linh kiện phụ trợ này để thông tuyến mạch kích.
3. Khuyến nghị thực chiến: Khắc chế hiện tượng "Quá tải ảo" do nhiễu dòng hãm
????️ MẸO TRỊ LỖI A.100 KHI MÁY GIẢM TỐC (DECELERATION):
Nhiều trường hợp máy tăng tốc, chạy tốc độ cao rất bình thường, nhưng cứ đến chu kỳ giảm tốc đột ngột là Driver chớp lỗi A.100. Đây không phải là chập IGBT, mà là do dòng điện trả ngược từ Motor về (Dòng phát điện tái sinh) quá lớn, vượt quá khả năng hấp thụ của điện trở xả hãm.
Giải pháp khắc phục:
-
Kiểm tra lại thông số thời gian giảm tốc (Deceleration Time) trong Driver hoặc PLC, nới rộng thời gian giảm tốc ra để giảm đỉnh dòng điện tái sinh.
-
Kiểm tra giá trị điện trở xả hãm gá ngoài (nếu có) nối vào chân B1 và B2. Dùng đồng hồ đo xem điện trở có bị đứt hoặc bị tăng trị số ôm ($Omega$) hay không. Thay thế điện trở xả có công suất $Watt$ lớn hơn để dập tắt nhanh dòng điện năng lượng dư thừa, giải phóng tầng công suất khỏi lỗi A.100.

Cẩm Nang Thực Chiến: Sửa Chữa Thần Tốc Và Thay Thế Linh Kiện Bo Mạch Servo YASKAWA
Hệ thống Servo YASKAWA (từ các dòng kinh điển Sigma-2, Sigma-3, Sigma-5 đến thế hệ mới Sigma-7, Sigma-10) là xương sống trong các dây chuyền CNC, cánh tay Robot và máy đóng gói tốc độ cao. Thiết kế phần cứng của YASKAWA cực kỳ bền bỉ, nhưng khi làm việc liên tục trong môi trường nhiệt độ cao, nhiều bụi dầu hoặc bị sốc điện lưới, các linh kiện điện tử dán (SMD) và khối công suất sẽ dần bị thoái hóa.
Đối với kỹ sư sửa chữa, việc thấu hiểu cấu trúc bo mạch nội bộ của YASKAWA là chìa khóa vàng để bốc đúng thuốc, trị đúng bệnh, phục hồi bo mạch về nguyên bản nhà sản xuất mà không cần thay cả bộ Driver đắt đỏ.
1. Bản đồ cấu trúc 3 tầng bo mạch nội bộ trên Driver YASKAWA
Khi "phẫu thuật" một bộ Driver YASKAWA Sigma-5 hoặc Sigma-7, cấu trúc phần cứng luôn được chia làm 3 khối bo tách biệt:
-
Bo nguồn điều khiển và Nguồn xung phụ (Control & SMPS Board): Chứa CPU xử lý thuật toán, chip nhớ EEPROM, cổng giắc truyền thông (CN1, CN2, CN3) và mạch nguồn xung hạ áp. Khối này quản lý các lỗi logic, lỗi truyền thông Encoder (A.C90, A.810) hoặc mất nguồn hiển thị.
-
Bo lái kích van và Cách ly quang (Gate Drive Board): Nằm trung gian, có nhiệm vụ nhận lệnh xung từ CPU và khuếch đại dòng điện lên đủ lớn để kích đóng/ngắt các cổng van của IGBT. Khối này sử dụng các IC lái dán chuyên dụng và các Opto cách ly tốc độ cao (High-speed Optocoupler).
-
Bo động lực chính (Power Board): Chứa cầu chỉnh lưu Đi-ốt, dàn tụ lọc nguồn khủng $DC Bus$, điện trở xả hãm nội bộ và khối công suất đúc IGBT / IPM. Đây là nơi chịu dòng điện và điện áp cao nhất, quản lý các lỗi chập cháy, quá dòng (A.100), ngắn mạch (A.120).
2. Quy trình 4 bước kiểm tra tĩnh và phác đồ xử lý bo mạch YASKAWA
1.Bước 1: Đo nguội chặn đứng rủi ro nổ bo mạch:Kiểm tra nghịch lưu IGBT.
• Chuyển đồng hồ vạn năng về thang đo Diode. Tiến hành đo kiểm tra tĩnh giữa chân $DC Bus$ (B1/⊕ và ⊖) với 3 pha ngõ ra Motor (U, V, W).
• Đo cả hai chiều thuận nghịch: Điện áp chỉnh lưu qua các van diode nội bộ của IGBT phải hiển thị khoảng $0.3 ext{V} - 0.4 ext{V}$. Nếu có bất kỳ pha nào đo ra $0.000 Omega$ (thông mạch hoàn toàn), khối IGBT đã bị đánh thủng. Tuyệt đối không cấp nguồn tổng để tránh nổ văng mạch.
2.Bước 2: Thay thế khối công suất IGBT/IPM chính hãng:Rã hàn chân rết lớn.
• Khi xác định IGBT hỏng, dùng trạm hàn công suất lớn hoặc mâm nhiệt gia nhiệt toàn bo mạch lên $160^circ ext{C}$ để làm mềm thiếc nhẹ. Nhổ bỏ khối công suất lỗi (thường của các hãng Mitsubishi, Fuji, SanRex mà YASKAWA tin dùng).
• Vệ sinh sạch lớp keo tản nhiệt cũ trên tấm nhôm. Phết một lớp Keo tản nhiệt chứa oxit kim loại (Thermal Paste) mới thật mỏng và đều, cố định chặt ốc module vào cánh tản nhiệt trước khi tiến hành hàn chân để tránh ứng suất làm nứt chân linh kiện khi máy giãn nở nhiệt.
3.Bước 3: Hồi sinh tầng lái Gate Drive bảo vệ IGBT:Thay thế IC lái và điện trở kích.
• Quy tắc sống còn: Khi IGBT bị nổ, dòng điện cao áp $540 ext{VDC}$ từ $DC Bus$ sẽ xông ngược về đường điều khiển, đánh cháy toàn bộ các con điện trở dán kích Gate (thường từ $4.7 Omega - 47 Omega$) và các IC Opto cách ly lái Gate.
• Tiến hành đo rà soát và thay mới toàn bộ các linh kiện nhỏ trên đường lái của cả 6 nhánh van (U, V, W - Top và Bottom). Nếu bỏ qua bước này, khi bạn đóng điện chạy thử, IGBT mới thay sẽ lập tức bị kích sai pha và phóng điện nổ tung một lần nữa.
4.Bước 4: Xử lý lỗi giả lập và Thay chip EEPROM dữ liệu:Đồng bộ hóa bo mạch.
• Trường hợp Driver báo các lỗi phần mềm cứng đầu như A.b10 hoặc A.b20 (Lỗi kiểm tra mạch đọc dòng) hoặc A.F10 (Mất pha nguồn), dù đo linh kiện ngoại vi vẫn tốt. Lúc này lỗi nằm ở IC cảm biến dòng Analog hoặc lỗi dữ liệu trong chip nhớ EEPROM.
• Dùng máy nạp chương trình (Programmer Encoder) để đọc file data gốc từ một Driver sống cùng mã (Model Code), sau đó khò nhấc chip EEPROM lỗi ra, nạp lại dữ liệu chuẩn và hàn trả lại bo mạch để đồng bộ hóa mã hóa hệ thống.
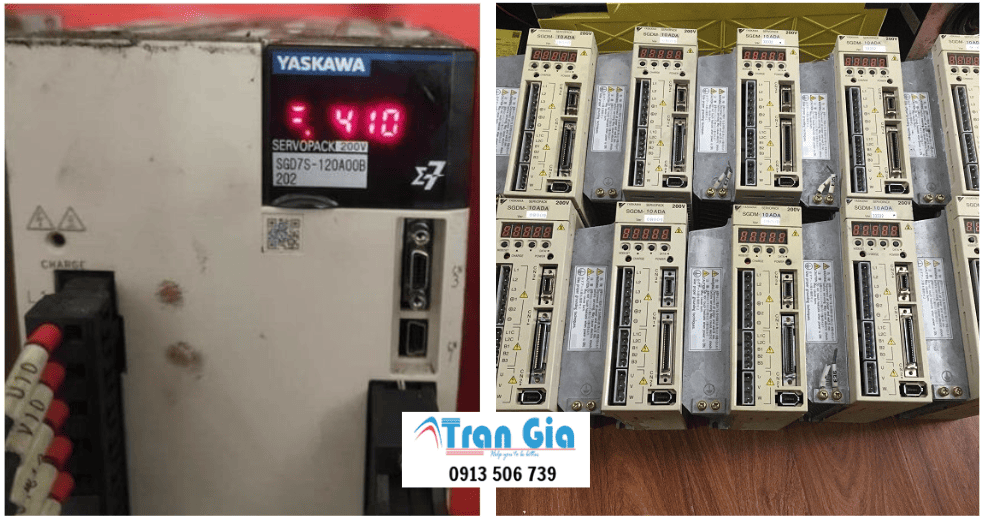
Chế Ngự Quá Nhiệt Và Quá Tải: Xử Lý Triệt Để Lỗi A.710 Và A.410 Trên Servo YASKAWA
Trong thuật toán bảo vệ của YASKAWA, hãng sử dụng cơ chế bảo vệ kép: Bảo vệ theo thời gian thực (Instantaneous Protection) và Bảo vệ tích lũy nhiệt độ theo đường cong đặc tính ($I^2t$ Thermal Accumulation Inverse-time Characteristic).
Điều này có nghĩa là Driver không đợi cho đến khi Motor cháy bốc khói mới báo lỗi, mà chip xử lý sẽ liên tục tính toán bình phương dòng điện ngõ ra nhân với thời gian hoạt động. Nếu năng lượng nhiệt tích lũy vượt quá ngưỡng thiết kế của cuộn dây động cơ hoặc cánh tản nhiệt nhôm của IGBT, hệ thống sẽ kích hoạt lỗi A.710 hoặc A.410.
1. Cơ chế giám sát nhiệt độ nội bộ và Thuật toán mô phỏng dòng tải
-
Lỗi A.710 (Overload): Lực tải cơ khí yêu cầu lớn hơn momen định mức của Motor trong thời gian dài. YASKAWA tích hợp thuật toán đếm ngược dòng điện. Nếu Motor chạy ở mức $200\%$ dòng định mức liên tục quá vài chục giây, Driver sẽ khóa xung để bảo vệ lớp cách điện (Insulation Class) của cuộn dây stator.
-
Lỗi A.410 (Driver Overheating): Gắn trực tiếp dưới bụng của khối công suất IGBT là một Điện trở nhiệt (Thermistor - NTC/PTC). Linh kiện này biến đổi sự thay đổi nhiệt độ của tấm nhôm tản nhiệt thành tín hiệu điện áp gửi về CPU. Khi quạt giải nhiệt hỏng hoặc lớp keo tản nhiệt bị khô, nhiệt độ tấm nhôm vượt quá $85^circ ext{C} - 95^circ ext{C}$, Driver lập tức báo A.410.
2. Quy trình 4 bước chẩn đoán nâng cao và xử lý lỗi quá tải, quá nhiệt
1.Bước 1: Giám sát tỷ lệ phần trăm tải thông qua phần mềm SigmaWin+:Đọc biểu đồ dòng tải thực.
• Kết nối Servo với máy tính, mở mục Trace Function hoặc Monitor Panel trên phần mềm SigmaWin+.
• Chạy máy thực tế và quan sát thông số Effective Torque Reference (Momen hiệu dụng). Nếu giá trị này liên tục duy trì trên $100\%$, hệ thống đang bị quá tải thực sự do cơ khí nặng, thiết kế sai công suất Motor, hoặc cơ cấu xích báng bị căng bó cứng.
2.Bước 2: Đo kiểm tra điện trở nội của cuộn dây stator Động cơ:Săn lùng tiếp điểm xung lực.
• Tháo cáp động lực từ Driver ra, dùng đồng hồ vạn năng (thang đo $Omega$ nhỏ) đo điện trở giữa các chân U-V-W của Motor xem có bị chạm chập nhẹ giữa các vòng dây (Turn-to-turn short circuit) hay không.
• Nếu một pha có điện trở sụt giảm bất thường, dòng điện chạy qua pha đó sẽ tăng vọt, đánh lừa Driver báo lỗi quá tải A.710. Trường hợp này bắt buộc phải quấn lại cuộn dây hoặc thay Motor mới.
3.Bước 3: Khắc phục hệ thống làm mát cưỡng bức xử lý lỗi A.410:Độ chế và thay thế quạt.
• Với lỗi quá nhiệt Driver A.410, kiểm tra xem quạt giải nhiệt (Cooling Fan) ở đỉnh hoặc đáy Driver có quay không. Quạt Servo YASKAWA thường là loại nguồn $24 ext{VDC}$ có chân tín hiệu phản hồi tốc độ (Sensor ròng dây).
• Nếu quạt bị kẹt bụi dầu không quay, tiến hành thay quạt mới đúng mã. Tuyệt đối không đấu tắt dây quạt thông thường vì Driver không nhận được xung tốc độ trả về từ chân Sensor quạt vẫn sẽ khóa lỗi A.410.
4.Bước 4: Sửa mạch đọc nhiệt độ Thermistor trên bo động lực:Xử lý cảm biến nhiệt dán.
• Nếu bật nguồn lên khi Driver còn lạnh ngắt mà màn hình đã báo ngay lỗi A.410, pan bệnh nằm ở con điện trở nhiệt NTC dán dưới gầm IGBT hoặc mạch khuếch đại điện áp nhiệt độ trên bo nguồn.
• Tiến hành rà soát các con điện trở dán xung quanh đường mạch Thermistor, thay thế con điện trở nhiệt dán mới (thường có trị số $10 ext{k}Omega$ hoặc $47 ext{k}Omega$ ở $25^circ ext{C}$) để khôi phục lại đường tuyến tính điện áp nhiệt độ chuẩn gửi về cho CPU.
3. Khuyên dùng thực chiến: Nới lỏng bộ lọc mô-men để triệt tiêu tải ảo
????️ MẸO TRỊ PAN BỆNH "QUÁ TẢI ẢO" DO CỘNG HƯỞNG CƠ KHÍ:
Nhiều trường hợp cơ khí chạy rất nhẹ bằng tay, Motor chọn dư công suất, nhưng khi máy chạy tăng tốc tạo ra tiếng "gầm" lớn và báo lỗi A.710. Đây là hiện tượng Quá tải ảo do cộng hưởng tần số cao. Hệ thống cơ khí bị rung lắc khiến vòng lặp tốc độ liên tục xuất lệnh bù mô-men cực đại để sửa sai số, làm dòng điện dao động liên tục tạo ra nhiệt lượng ảo.
Giải pháp tối ưu:
Vào tham số Pn10C (Torque Reference Filter Time Constant) - Bộ lọc hằng số thời gian momen. Hãy thử nâng nhẹ giá trị này từ 0.40 lên 1.00 hoặc 1.50 mili-giây. Bộ lọc này sẽ làm mịn các đỉnh nhọn dòng điện do rung động cơ khí gây ra, dập tắt hiện tượng tự kích dòng, giúp Motor chạy êm hơn và loại bỏ hoàn toàn lỗi A.710 mà không ảnh hưởng đến độ chính xác vị trí.
Một số hình ảnh sửa servo đang trong quá trình sửa chữa tại TRAN GIA Automation








Công ty Trần GIA tự hào là đơn vị hàng đầu cung cấp servo bảo hành lên tới 12 tháng dịch vụ sửa chữa, bảo trì Xử lí gấp Sửa chữa servo YASKAWA, chuyên thay thế board mạch linh kiện và tư vấn kỹ thuật trong lĩnh vực điện tử và thiết bị công nghiệp. Với đội ngũ kỹ thuật viên chuyên nghiệp, giàu kinh nghiệm, chúng tôi cam kết mang đến giải pháp tối ưu, chất lượng cao và giá cả hợp lý cho khách hàng. Trần GIA luôn đặt sự hài lòng của khách hàng lên hàng đầu, phục vụ nhanh chóng, tận tình và chuyên nghiệp. HOTLINE: 0913 56 739
Chúng tôi cam kết sử dụng linh kiện chính hãng, áp dụng các tiêu chuẩn kỹ thuật cao nhất nhằm đảm bảo độ bền và hoạt động ổn định của thiết bị sau sửa chữa. Trần GIA luôn đặt lợi ích của khách hàng lên hàng đầu bằng dịch vụ tư vấn tận tình, hỗ trợ nhanh chóng và chính sách bảo hành rõ ràng, minh bạch.
Vì sao chọn TRAN GIA Automation Xử lí gấp Sửa chữa servo YASKAWA, chuyên thay thế board mạch linh kiện
Bảo hành
– Các khu vực chúng tôi chuyên cung cấp servo : Thành phố Hồ Chí Minh, Long An, Bình Dương, Bình Phước, Bà Rịa-Vũng Tàu, Tây Ninh, Tiền Giang, Tp. Cần Thơ, Sóc Trăng, Bến Tre, An Giang, Đồng Tháp, Kiên Giang, Vĩnh Long, Trà Vinh,…
– Sửa servo tận nơi: Tân Phú, Tân Bình, Gò Vấp, Quận 1, Quận 3, Thủ Đức, Quận 5, Quận 6, Bình Tân, Phú Nhuận, chợ Nhật Tảo, chợ Dân Sinh, KCN Thuận Đạo, KCN Tân Bình, KCN Vĩnh Lộc, KCN Lê Minh Xuân, KCN Mỹ Phước 1, KCN Mỹ Phước 2, KCN Mỹ Phước 3, KCN Sóng Thần, KCN Linh Trung, KCN Hiệp Phước, KCX Tân Thuận, KCN Tân Tạo, KCN Tân Phú Trung, KCN Tây Bắc Củ Chi, KCN Đông Nam, KCN Tân Phú Trung,….